이번 3부에서는 RWR의 위협 위치를 알아내는 Geolocation 기법에 대해 알아본다.
위협 Geolocation 기법
위협 geolocation의 목적은 위협 레이다의 위치를 주로 좌표로 결정하는 것이다.
이러한 정보는 다른 항공기에게 위협에 대한 경고를 할 때에 사용될 수 있으며 또한 이 좌표가 충분히 정확하면 위협에 대한 조준과 공격도 가능하다.
현재까지 이러한 위협 geolocation은 전략적 자산과 F-4G Wild Weasel과 같은 특별한 전술 항공기를 통해 수행되었다.
태생적인 시간의 지연으로 인해 전술 채널을 통해 제공되는 데이터는 종종 이동하는 위협 시스템에 활용할 수 없었다.
이동하는 시스템은 재배치로 인해 데이터를 쓸모없게 만들기 때문이다.
여기서는 방향 탐지(DF, Direction Finding)로 알려진 geolocate에 사용되는 세 가지의 기법에 대해 알아본다. 세 가지는 삼각측량과 inteferometry, 그리고 도착 시간이다.
세 가지의 모든 기법은 수신 항공기가 자신의 위치를 정확히 결정할 수 있는 능력에 의존하며 발전된 GPS 수신기는 이를 더욱 쉽게 만들 수 있다.
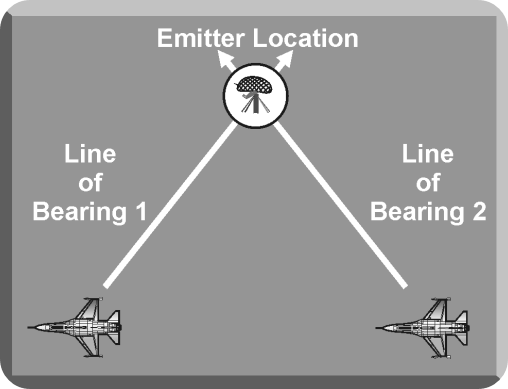
삼각측량(Triangulation)
삼각측량은 가장 기본적인 DF의 한 형태이다.
이는 둘 이상의 소스에서 방향을 측정해야 한다.
방위 측정이 서로 교차하는 부분을 “line of bearing”이라 부르며 에미터의 위치가 된다.
이를 더욱 효율적으로 하기 위해서 항공기는 자신의 현재 위치 데이터는 반드시 정확해야 한다.
[ Multiple Aircraft ]
삼각측량은 수신기를 장착한 여러 대의 항공기가 필요하거나 아니면 한 대의 항공기가 일정 시간 동안 수행할 수 있다.
여러 대의 항공기가 제공하는 각도 측정의 장점은 angle-off 값을 증가시킬 수 있고 측정 속도를 증가시킬 수 있다.
삼각측량에서 가장 좋은 방위각 cut은 90˚ 각도에서 접근하는 것이다.
위협 에미터가 DF 작전을 수행 중이라는 것을 알게 되면 가능한 송신 시간을 짧게 하려 하기 때문에 측정 시간은 중요하다.
여러 대의 플랫폼이 측정하는 삼각측량의 단점은 여러 대의 플랫폼이 하나의 레이다를 측정하기 위해 통신이 필요하다는 것이다.
이는 밀도가 높은 레이다 환경에서는 어려운 일이 수 있다.
[ Single Aircraft ]
하나의 항공기를 통한 삼각측량은 다른 항공기와의 교신 신호가 필요없다.
그러나 여러 개의 방위 측정을 위해 어느 정도의 구간을 이동해야 한다.
단일 항공기를 통한 DF에서의 정확도는 수신기의 성능, 표적 레이다와의 거리, 항공기의 속도, 그리고 표적 레이다가 방사하는 시간에 의해 달라진다.
Interferometry
두 번째 기법은 interferometry이다.
이 기법은 위상 interferometry 또는 도착 신호의 위상 차라고 알려져 있다.
이러한 시스템은 두 개나 그 이상의 DF 안테나에 도달한 레이다 파장의 위상을 비교한다.
이 위상의 차이는 도착 각도(AOA, Angle of Arrival)로 계산된다.
항공기에서는 다른 부위에 DF 안테나를 장착해야 한다.
다중의 AOA 측정은 위협의 거리와 위치를 제공하는 데 사용된다.
Interferometry 시스템의 핵심 구성요소는 고정된 위치에서 수신기에 매칭되어 있는 두 개의 안테나와 위상 비교기, 그리고 프로세서이다.
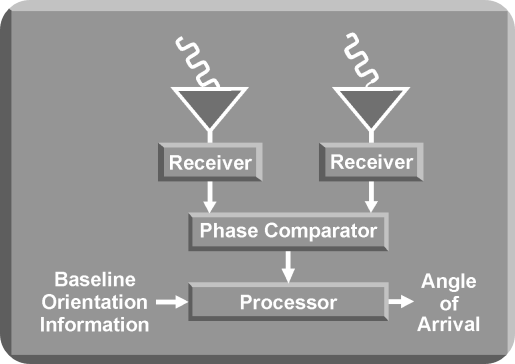
각 수신기에서 나온 중간 주파수는 위상 비교기로 들어가고 두 신호의 상대적인 위상값을 측정한다.
이 상대적인 위상값은 프로세서로 들어가고 여기서 두 안테나의 기준 위치((baseline으로 부른다)에 대한 상대적인 AOA를 계산한다.
또한 대부분의 시스템에서 프로세서는 진북이나 로컬 수평에 대한 상대적인 baseline의 값을 받아들여 에미터의 절대 방위나 고도 값을 결정한다.
더욱 빠른 에미터 위치를 얻기 위해서 몇몇 interferometry 시스템은 다중의 수신기 안테나를 배열형태로 갖추기도 한다.
이를 통해 방위와 고도 측정을 동시에 수행하여 에미터의 위치를 빠르게 파악한다.
배열 안테나는 서로 다른 안테나 짝을 선택함으로써 long baseline과 short baseline을 서로 섞는 것을 가능하게 한다.
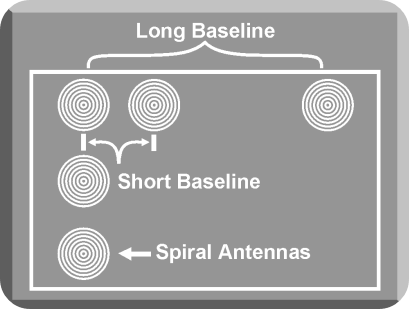
Long baseline과 short baseline은 interferometry 시스템에서 안테나 요소 간의 거리로 정의된다.
Long baseline은 빠르고 정확한 반면에 다른 전파면이 다른 안테나 요소에 닿으면서 생기는 모호성이 문제가 된다.
그래서 기존의 RWR 안테나를 사용하여 long baseline 시스템을 만들고 작은 short baseline 시스템을 추가하여 모호성을 보상할 수 있다.
도착 시간 (TOA, Time of Arrival)
TOA와 도착 시간 차인 TDOA(Time Difference of Arrival)는 모두 레이다 신호가 빛의 속도로 이동한다는 사실을 전제로 한다.
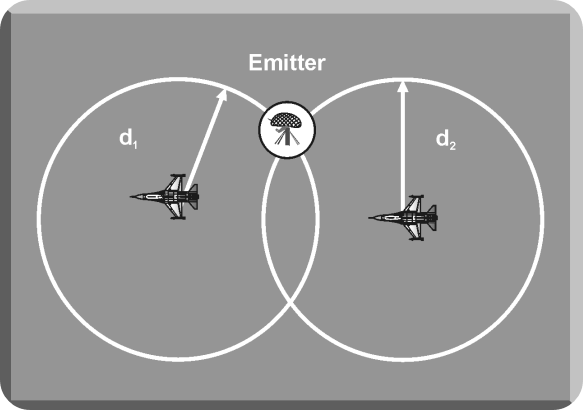
빛의 속도를 상수로 두고 수신기로부터 떨어져 있는 에미터의 거리를 계산하는데 거리는 속도에 시간을 곱한 값과 같다는 방정식을 이용한다.
여기에는 어떠한 방향 정보가 없기 때문에 이 방정식은 수신 안테나 주변으로의 원의 반지름을 의미하게 된다.
즉, 여러 수신기로부터 얻은 여러 개의 거리 측정값은 서로 겹치게 되고 이 겹쳐진 위치가 에미터의 위치가 된다.
만약 두 개의 수신기만이 이용된다면 단순한 DF 기법은 에미터의 위치를 말해주는 교차지점의 모호성을 풀 수 있다.
TOA 위치는 레이다를 떠난 시간과 수신기에서 측정된 도착 시간을 수학적으로 계산하여 거리를 알아낸다.
TOA 위치 기법의 주요 도전과제 중 하나는 언제 송신된 신호인지를 측정하는 것이며 이는 매우 협조적인 위협이거나 또는 기준 시간을 이용하는 형태의 레이다 신호를 요구한다.
또 다른 과제는 다중의 수신기기가 동일 신호에 대한 시간이라는 것을 확실시하는 것이다.
이는 복잡한 위협 신호 환경에서는 특히 어려운 일이다.
[ TDOA ]
TDOA는 신호가 송신된 시간을 결정하지 못할 때 사용된다.
TDOA는 신호의 알지 못하는 송신 시간을 보상해야 한다는 것만을 제외하고는 TOA와 개념이 동일하다.
이는 첫 번째 수신기와 이격 거리를 알고 있는 추가적인 수신기를 이용하여 거리 커브를 생성한다.
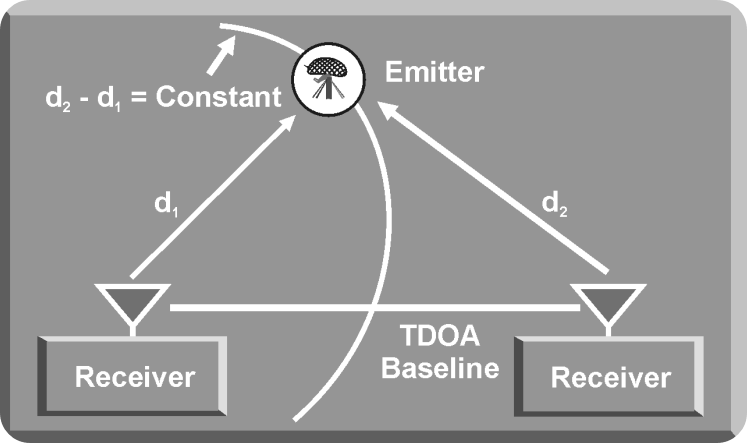
신호의 도착 시간은 두 개의 수신기에서 정밀하게 측정되며 두 개의 수신기에서 t1과 t2 시간에 수신된 신호는 도착 시간 차이에 의해 정의되는 커브상에 위치한다는 이론이다.
예를 들면, 신호가 정확히 같은 시간에 두 포인트에 도착했다면 송신기는 두 수신기와 같은 거리에 위치할 것이다. 이 경우에 커브는 수신기들로부터 동일한 위치가 가능한 직선이 되며 쉽게 그릴 수 있다.
두 수신기에 서로 다른 시간에 신호가 도착한 경우에는 송신기가 위치할 가능성이 있는 지점이 직선 대신 포물선 형태의 커브가 된다.
다음의 그림은 서로 다른 시간에 신호가 도달한 예를 나타내며 상수값은 시간 차이에 빛의 속도를 곱한 거리이다.
TDOA를 이용하여 에미터의 위치를 알아내기 위해서는 첫 두 개의 수신기와 같은 선상에 있지 않는 또 다른 안테나 수신기가 요구되며 이를 통해 독립적인 커브를 생성하고 첫 커브와 교체되는 지점에 송신기 위치가 된다.
시간측정 기법은 수신 시스템의 매우 정확한 시간 측정 정확도를 요구한다.
만약 수신기가 다른 항공기와 같이 떨어져 있다면 삼각측량에서처럼 주요 도전 과제는 여러 항공기에서의 동일 신호를 측정하기 위한 조정이 되겠다.
시간 측정 기법은 측정하려는 레이다 형태에 영향을 받는다.
순수한 CW 레이다는 시간 측정이 불가하다.
반면에 펄스 신호는 측정이 용이하다.
여기까지 3부에 걸쳐서 RWR의 구성품과 각 구성품의 동작, 그리고 기본적인 원리에 대해 알아봤다.
다음에는 이 책의 마지막 챕터인 자체보호 재머 시스템의 기본적인 운영에 대해 알아보겠다.
출처 : Electronic Warfare Fundamentals
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| CHAPTER 17. RADAR WARNING RECEIVER BASIC OPERATION AND GEOLOCATION TECHNIQUES ( (1) | 2023.05.20 |
|---|---|
| CHAPTER 17. RADAR WARNING RECEIVER BASIC OPERATION AND GEOLOCATION TECHNIQUES (1) (4) | 2023.05.14 |
| CHAPTER 16. RADAR ELECTRONIC PROTECTION (EP) TECHNIQUES (2) (1) | 2023.04.30 |
| CHAPTER 16. RADAR ELECTRONIC PROTECTION (EP) TECHNIQUES (1) (1) | 2023.04.22 |
| CHAPTER 15. IR COUNTERMEASURES (2) (2) | 2023.04.02 |


댓글