차세대 위협 레이다가 갖는 EP 기능 중 3부에서는 RGPO와 펄스 도플러 레이다의 전자기 보호 기능에 대해 알아본다.
Range Gate Pull-Off
RGPO(Range Gate Pull-Off) 기만 재밍은 가짜 반사 펄스를 생성하여 각 연속되는 펄스의 지연 시간을 증가시켜 레이다로 하여금 표적이 멀어지는 것처럼 보이게 만든다.
따라서 레이다는 거리 추적을 놓치게 된다.
RGPO는 이를 레이다의 late gate에 큰 에너지의 재밍 펄스를 인가함으로써 수행한다.
[ RGPO에 대한 전자기 보호 기법 ]
이러한 RGPO에 대항하기 위해 레이다가 사용하는 EP 기법은 leading-edge 추적이다.
아래의 그림과 같이 레이다는 반사 신호의 leading edge 에너지를 통해 표적의 거리를 추적한다.

RGPO 재머에 trhoughput 지연이 있다고 가정하면, 재밍의 leading edge는 반사 신호의 leading edge보다 늦게 시작하게 된다.
Schleher는 최대 50 ns의 재밍 처리 지연까지는 RGPO 재머가 레이다 추적을 기만할 수 있다고 말한다.
이보다 더 긴 지연은 레이다가 재밍 신호를 볼 수 없게 만들고 레이다는 계속해서 표적으로부터의 반사 신호 펄스를 추적할 수 있다.
Leading edge 추적을 극복하기 위한 재밍 기법은 RGPI(Range Gate Pull-In)가 있으며 또한, inbound range gate pull-Off라고도 부른다.
다음의 그림에서 재머는 시간을 선행하는 가짜 펄스 신호를 생성하고 각 펄스는 그 양을 증가시킨다.
가짜 펄스는 실제 표적 반사 펄스를 통과하여 뒤쪽으로 움직이며 레이다가 비록 leading edge 추적을 사용하고 있더라도 거리 추적을 기만할 수 있으며 레이다로 하여금 표적이 레이다 쪽으로 움직이고 있는 것으로 보이게 만든다.
이로 인해 레이다는 거리 추적을 놓치게 된다.
RGPI를 위해서 재머는 반드시 PRI 추적기를 가지고 있어야 하며 이를 통해 다음 펄스의 발생 시간을 예측할 수 있다.
[ RGPI에 대한 전자기 보호 기법 ]
RGPI에 대항한 레이다의 EP 기법은 지터 펄스를 사용하는 것이다.
지터 펄스에서 각 펄스의 간격은 랜덤이며 그래서 재머는 다음의 레이다 펄스 타이밍을 예측할 수 없으며 예측되는 펄스의 위치에 가짜 펄스를 생성할 수 없다.
자동 이득 조절 재밍 (AGC Jamming)
강하고 좁은 재밍 펄스에서의 AGC(Automatic Gain Control) 재밍은 레이다의 스캔 속도에 대해 생성된다.
좁은 재밍 펄스는 레이다의 AGC를 기만하고 그래서 레이다는 그 각도에서의 이득값을 줄이게 되며 레이다 스캔 안테나에 의한 표적 반사 신호 펄스의 크기 변화를 볼 수 없게 된다.
그렇기 때문에 레이다는 각도 추적 기능을 할 수 없게 된다.
재밍 펄스는 낮은 듀티 싸이클을 가지고 있어서 이 기법은 작은 재머 에너지로도 효과적인 재밍이 가능하다.
[ AGC 재밍에 대한 전자기 보호 기법 ]
AGC 재밍 기법에 대항하는 레이다 EP 기법은 다음의 그림과 같은 Dicke fix이다.
Dicke fix는 레이다 펄스에 매칭되는 대역의 협대역 채널이 뒤따르는 리미터가 있는 광대역 채널을 포함하고 있다.
좁은 재밍 펄스는 넓은 대역폭을 갖고 있기 때문에 레이다의 광대역 채널에서 잘리게 된다.
레이다의 필요한 AGC 기능은 협대역 채널에서 수행되며 그러므로 이전의 제한된 좁은 펄스에 의한 기만을 당하지 않는다.
잡음 재밍 품질(Noise-Jamming Quality)
잡음 재밍의 효과도는 잡음의 품질에 의해 크게 영향을 받는다.
일반적으로 잡음 재밍은 백색 가우시안이다.
그렇기 때문에 포화된 재머 증폭기 내에서의 왜곡은 레이다 수신기 입장에서는 많은 데시벨의 J/S 감소를 가져온다.
다음의 그림은 고품질의 잡음 재밍을 생성할 수 있는 하나의 방법을 보여준다.
CW 신호가 레이다 수신기의 대역폭보다 훨씬 넓은 주파수 밴드에 걸쳐 가우시안 신호에 의해 주파수 변조된다.
재밍 신호가 레이다 수신기를 통과할 때에 임펄스가 생성된다.
이렇게 랜덤 하게 생성되는 연속의 임펄스는 레이다 수신기에 고품질의 백색 가우시안 잡음을 일으키게 된다.
[ 잡음 재밍에 대한 전자기 보호 기법 ]
여기서 임펄스는 태생적으로 매우 넓은 대역폭을 갖는다.
그렇기 때문에 Dicke fix의 광대역 채널에서 잘리게 되고 협대역 채널에서는 J/S가 줄어들게 된다.
이는 잡음 재밍 기법에 대한 효과적인 EP 기법이 된다.
펄스 도플러 레이다 구성
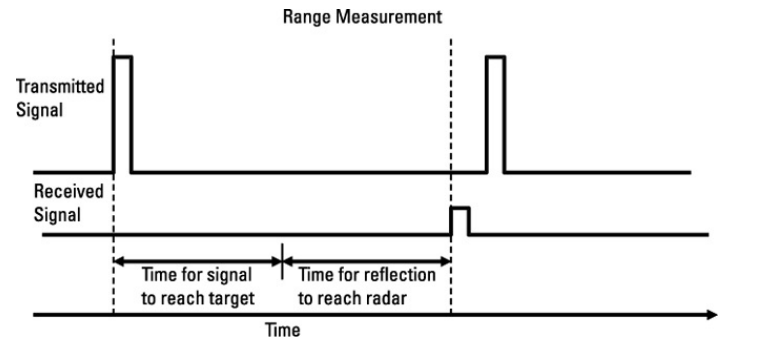
각 펄스는 동일한 RF 신호의 한 샘플이기 때문에 펄스 도플러 레이다는 coherent 하다.
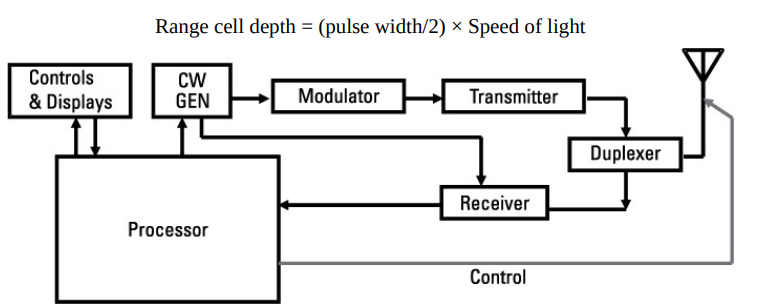
따라서 수신 신호의 도착 시간과 도플러 변화를 같이 측정할 수 있다.
신호의 도착 시간은 표적까지의 거리를 알 수 있고 도플러 변화는 레이다에 대한 표적의 상대적인 속도에 의해 발생한다.
그러나 펄스 도플러 레이다 처리는 극복해야 할 심각한 모호성 문제가 있으며 이에 대해서는 뒷부분에서 알아보도록 하겠다.
펄스 도플러 레이다 내의 프로세서는 다음의 그림과 거리대 속도의 매트릭스를 형성할 수 있다.
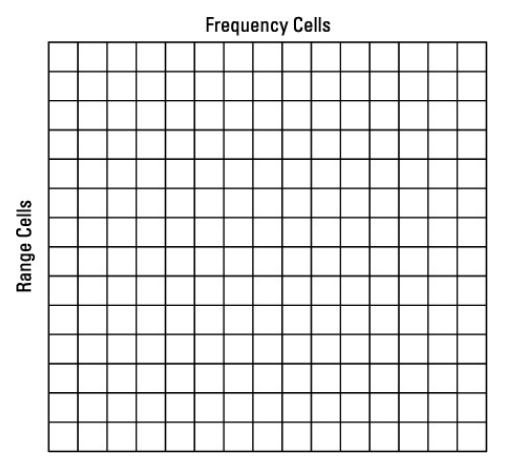
거리 셀은 송신된 펄스에 대해 수신된 펄스의 도착 시간을 보여주며 각 셀은 하나의 거리 해상도를 갖는다.
시간 해상도 또는 거리 셀의 깊이는 펄스폭의 절반에 해당한다.
다음의 식을 통해 거리 해상도를 구할 수 있다.
Range cell depth = (pulse width/2) x Speed of light
이 거리 셀들은 펄스 간의 전 시간 동안 연속적이다.
속도 셀들은 채널화 필터 뱅크 또는 FFT(Fast Fouier Transform) 처리에 의한 채널화를 통해 생성된다.
속도 채널 즉, 도플러 주파수의 폭은 각 필터의 대역폭과 같다.
필터 대역폭의 역수는 CPI(Coherent Processing Interval)이며 이는 레이다가 신호를 처리하는 시간을 말한다.
Search 레이다의 경우 CPI는 레이다 안테나가 표적을 비추는 동안의 시간과 같다.
그렇기 때문에 주파수 채널은 매우 좁다.
예를 들어 레이다가 표적을 비추는 시간이 20 ms라고 하면 필터의 대역폭은 50 Hz가 된다.
레이다에 의해 통합 처리되는 펄스의 개수는 프로세싱 이득을 결정하며 프로세싱 이득은 다음의 식과 같다.
Processing Gain(in dB) = 10log(CPI x PRF) 또는 10log(PRF/필터 대역폭)
표적 분리 (Separating Targets)
RGPO 기만 재밍을 고려해할 때에 아래의 그림은 실제 표적 반사 신호와 재머에 의한 가짜 신호를 나타낸다.
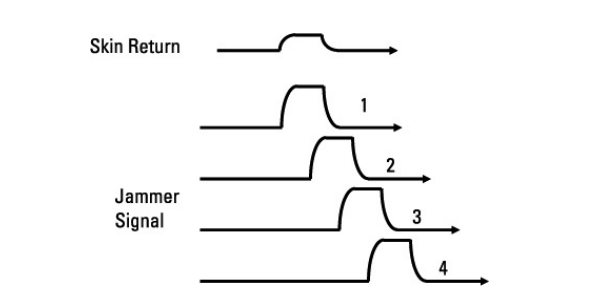
과거의 레이다의 경우 펄스 도플러 레이다의 연속적인 거리 셀 대신에 프로세서가 early와 late gate를 갖는다.
그래서 재밍 펄스는 높은 J/S를 이용하여 레이다의 거리 추적을 기만할 수 있다.
그러나 펄스 도플러 레이다는 수신 신호의 두 측면을 모두 볼 수 있는데 각 펄스는 다음의 그림처럼 시간 대 속도 매트릭스상에 위치하게 된다.
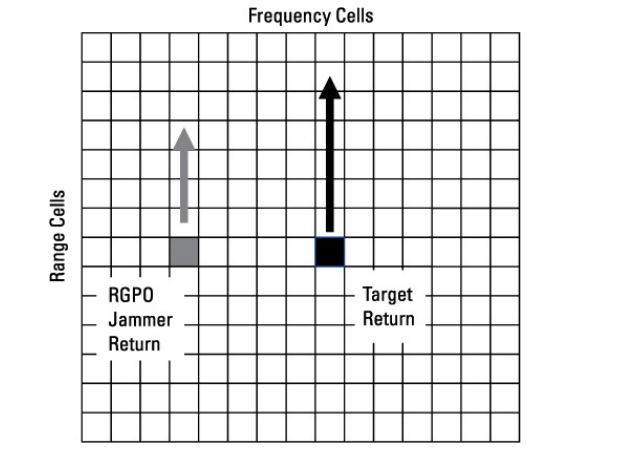
실제 표적 반사 신호는 거리 값이 증가하는 연속된 거리 셀들을 통해 움직인다.
이 증가하는 거리는 속도를 의미한다.
따라서 표적 반사 신호는 도플러 변화에 해당하는 속도 셀에 위치하게 된다.
반면에 재머 펄스들은 재머가 지연을 가하기 때문에 확실히 거리는 증가하게 된다.
그러나 도플러 주파수 셀은 재머의 실제 속도에 의해 결정되기 때문에 재머 펄스들은 거리 변화율과 관련 없는 속도 셀에 위치하게 된다.
이를 통해 펄스 도플러 레이다는 도플러 변화에 의해 거리 변화율이 있는 펄스들을 선택하게 되고 RGPO 재밍에 기만당하지 않게 된다.
이러한 펄스 도플러 레이다의 장점을 재머가 극복하기 위해서는 VGPO(Velocity Gate Pull-Off)를 적용해야 한다.
Coherent Jamming
다음의 그림처럼 표적으로부터의 coherent 반사 신호는 단일 도플러 셀에 위치한다.
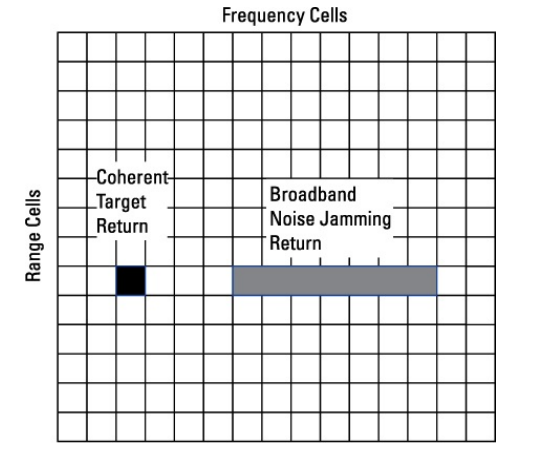
예를 들어 barrage 또는 noncoherent spot noise와 같은 광대역 재밍 신호들은 다중의 주파수 셀을 점유하게 되고 따라서 펄스 도플러 레이다는 coherent 표적 반사 신호를 구분해 낼 수 있게 된다.
이는 펄스 도플러 레이다를 기만하기 위해 재머는 coherent 재밍 신호를 생성해야 함을 의미한다.
Chaff에 의한 영향 또한 레이다 신호를 넓게 퍼뜨리게 된다.
따라서 펄스 도플러 레이다는 이 퍼져있는 주파수를 탐지할 수 있고 Chaff에 의한 반사 신호를 구분할 수 있다.
펄스 도플러 레이다의 모호성(Ambiguities)
레이다에서 모호성이 발생하지 않는 최대 탐지 거리는 송신된 펄스가 다음번의 펄스 송신 전까지 빛의 속도로 왕복할 수 있는 것을 말한다.
Ru = (PRI/2) x C
여기서 Ru는 모호성이 발생하지 않는 거리이며 미터 단위를 사용한다.
예를 들면, 만약 PRI가 100 us이면 모호성이 발생하지 않는 거리가 15 km가 된다.
펄스 반복 주파수인 PRF가 높으면 PRI는 짧아지고 따라서 모호성이 발생하지 않는 거리는 짧아진다.
만약 PRF가 매우 높으면 많은 거리 모호성이 발생한다.
반사 신호의 도플러 변화 주파수는 펄스 도플러 레이다의 도플러 필터 안에 존재한다.
최대 도플러 주파수 변화를 구하는 식은 다음과 같다.
ΔF = (vR/c) x 2F
여기서 ΔF는 도플러 변화이며 kHz 단위를 사용하며, vR은 초당 거리의 변화율이고 F는 운용 주파수이고 kHz 단위이다.
예를 들면, 만약 운용 주파수 10 GHz의 레이다가 최대 거리 변화율 500 m/s의 표적을 탐지하기 위해 설계되었다고 가정하자.
이 경우의 도플러 주파수 변화는 33.3 kHz가 된다.
펄스 신호의 스펙트럼은 PRF와 동일한 주파수 간격을 갖는 스펙트럴 라인 성분을 갖는다.
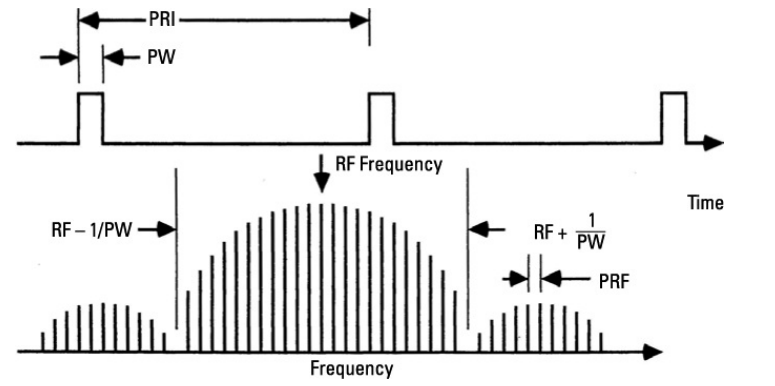
만약 PRF가 1,000 pps로 낮다면 스펙트럴 라인 간의 간격은 1 kHz가 된다.
만약 PRF 300 kpps로 높다면 스펙트럴 라인의 간격은 300 kHz가 된다.
여기서 스펙트럴 라인 간격이 최대 도플러 주파수 변화보다 작다면 주파수 모호성을 일으킨다.
즉, 낮은 PRF는 더 큰 주파수 모호성을 갖는다.
1,000 pps의 PRF는 33.3 kHz의 도플러 변화 주파수에서 많은 모호성을 일으키며 반면에 300 kpps의 PRF는 전체 주파수 처리 매트릭스에서 모호성이 발생하지 않는다.
종합하면, PRI가 최대 표적 탐지 거리까지의 왕복시간보다 짧으면 거리 모호성이 발생하고 PRF가 최대 도플러 변화 보다 작으면 속도 모호성이 발생한다
펄스 도플러 레이다의 Low, High , Medium PRF
운용하는 PRF에 따라 펄스 도플러 레이다는 세 가지로 구분된다.
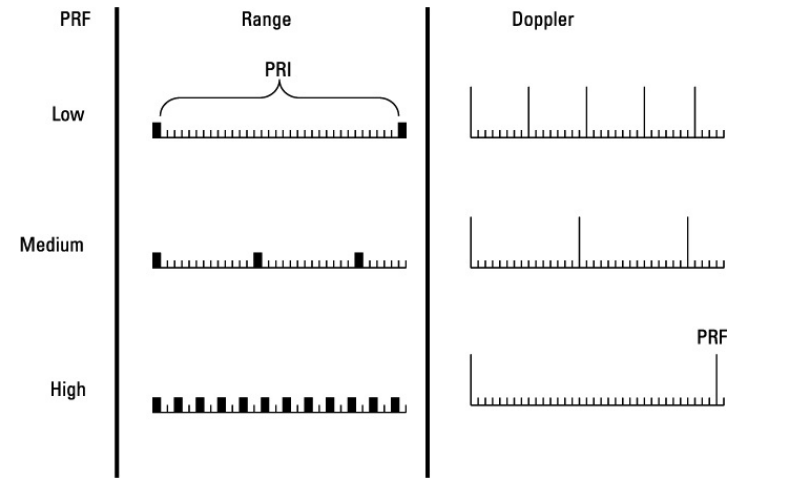
LOW PRF 레이다는 긴 PRI로 인해 거리 모호성이 적어 표적 거리를 획득하는 레이다에서 사용된다.
그러나 낮은 PRF는 높은 도플러 주파수 모호성을 갖는다.
이는 표적 속도 측정에 모호성이 있음을 의미하며 RGPO와 RGPI 재밍에 취약하다.
High PRF 레이다는 도플러 주파수의 모호성이 적어 정면에 고속으로 접근하는 표적을 탐지하는데 이상적이다.
큰 도플러 주파수는 지면으로부터의 반사 신호와 내부 잡음 간섭과 멀리 떨어져 있기 때문에 매우 유용하다고 할 수 있다.
그러나 높은 PRF는 낮은 PRI 이기도 하며 따라서 거리의 모호성이 커진다.
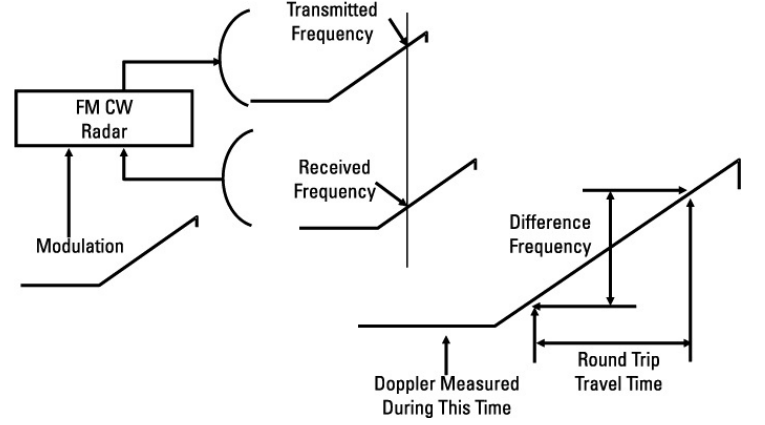
이러한 레이다는 속도 측정 모드에서 사용될 수 있으며 또한 아래의 그림과 같이 주파수 변조를 통해 거리를 측정할 수 있다.
표적의 꼬릴 추적하는 교전에서는 거리 변화율이 작다는 특성이 있으며 따라서 정면 접근 교전보다 훨씬 낮은 도플러 주파수 변화가 일어난다.
이는 높은 PRF 펄스 레이다의 장점을 소용없게 만든다.
Medium PRF 레이다는 거리와 속도 두 측면에서 모두 모호성을 갖는다.
이러한 레이다는 표적 꼬리를 추적하는 교전에서의 성능 향상을 위해 개발되었다.
Medium PRF 펄스 도플러 레이다는 여러 개의 PRF를 사용하며 각각은 거리 대 속도 매트릭스에서 모호성 존을 생성한다.
처리에 있어서 표적을 추적하는 데에 거리와 속도의 모호성이 존재하지 않는 몇몇의 PRF를 결정할 수 있다.
'Electronic Warfare > Study-EW 104' 카테고리의 다른 글
| Next Generation Threat Radars - 전자기 보호 (5) (2) | 2023.09.21 |
|---|---|
| Next Generation Threat Radars - 전자기 보호 (4) (1) | 2023.09.02 |
| Next Generation Threat Radars - 전자기 보호 (2) (2) | 2023.07.30 |
| Next Generation Threat Radars - 전자기 보호 (1) (2) | 2023.07.22 |
| EW 104 - Legacy Radar (1) | 2023.07.09 |




댓글