다음의 글은 RWR과 같은 신호의 방향을 탐지하는 시스템에서 방향탐지의 정확도 개념과 왜 RMS로 정확도를 표현하는지에 대해 설명한 내용입니다.
개요
어떤 전자전 응용분야에서 시스템은 에미터의 상대적인 위치를 파악하는 것 만을 원할 수 있다.
다른 경우에는 시스템은 에미터의 실제 위치를 알고 싶어 한다.
만약 상대적인 위치만 요구된다면 이 응용분야는 아마도 레이다 경보 시스템일 것이며 레이다와 연관된 적의 기총이나 미사일과 같은 적 에미터를 탐지하고 보고한다.
이 경우에 보호받는 자산으로부터 에미터까지의 방위각과 거리만이 탐지되고 보고된다.
보호를 받는 자산(예, 항공기)은 레이다가 존재하며 적 레이다까지의 거리, 그리고 레이다 신호의 도착 방향을 아는 것이 필요하다.
신호의 도착 방향은 항공기의 전방 방향에 대한 상대적인 방향으로 보고되고 조종사를 위한 조종석의 디스플레이에 시현된다.
도착 방향(Direction-of-arrival) 측정 정확도는 다음의 그림과 같이 실험용 턴 테이블 위에 시험할 시스템을 올려놓고 에미터는 시스템을 향해 방사를 하고 시스템은 이를 측정하게 된다.
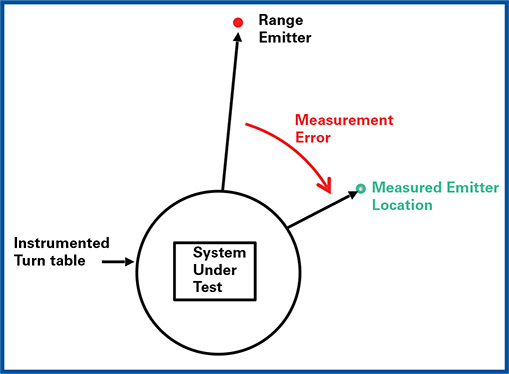
턴 테이블은 각 방향으로부터 신호를 시험하기 위해 회전한다.
측정된 도착 각도는 턴 테이블의 위치에 의해 결정되는 실제 도착 각도와 비교된다.
이 두 값의 차이가 그 주파수에서의 시스템 에러가 된다.
일반적으로 턴 테이블은 신호 환경이 깨끗한 무반향 시험실에 설치되며 여기서 수집된 에러 데이터는 시스템의 에러를 보정하는 데이터로도 사용될 수 있다.
이 에러 데이터는 타워에 장착된 송신기로부터 어느 정도 거리가 떨어진 항공기나 배에 장착된 시스템을 동작시킴으로써 항공 시스템에 대해 수집되기도 한다.
비행 시험에 실제 각도는 항공기의 항법 시스템에 의해 결정된다.
일반적으로 시스템을 뱅킹 회전 없이 편평한 원을 그리며 비행을 하는 것이 가장 좋은 방법이다.
에러 데이터는 정확도 결정이나 보정을 위해 사용될 수 있다.
해상 시스템은 송신기를 주변으로 날리거나 고정된 시험용 송신기 주변을 움직이면서 평가 또는 보정을 할 수 있다.
RMS ERROR
방향 탐지 임무에서, 우리는 신호 도착 방향 측정의 효과적인 정확도를 알고 싶어 한다.
그리고 우리는 다양한 DF(Direction Finding) 기법들의 정확도 값들을 고려한다.
AOA(Angle-Of-Arrival) 시스템에서 이 정확도는 일반적으로 RMS(Root Mean Square) 각도 에러 값으로 표현된다.
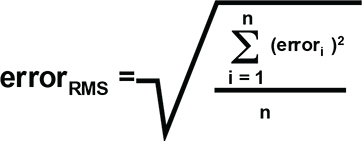
RMS 에러를 결정하기 위해서 시스템의 전체 각도 범위(보통 360°)의 서로 다른 많은 각도들로부터 데이터를 얻어야 하며, 또한 시스템의 전체 주파수 범위에서 데이터를 획득해야 한다.
각 측정된 도착 각도는 실제의 각도와 비교되어 각도 에러 값을 결정한다.
이후 각 에러는 제곱이 되고 제곱된 에러는 평균되고 루트가 써진다.
수식은 다음과 같다.
평균과 표준 편차
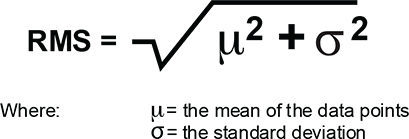
RMS 에러는 종종 두 가지 부분으로 고려된다.
그것은 평균(mean)과 표준 편차(Standard Deviation)이다.
평균 에러는 단순히 모든 측정된 에러 값들을 평균한 것이다.
또한, 표준 편차는 사실 평균된 에러 성분이 없는 RMS 에러이다.
RMS 에러와 평균 에러, 그리고 표준 편차 간의 관계는 아래의 식과 같다.
다음의 그림을 보면, 에미터 위치 시스템에 의해 계산된 많은 수의 위치 값들을 볼 수 있다.
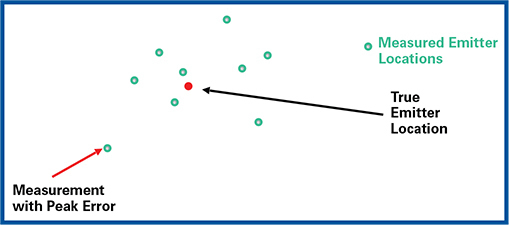
아마도 이 점들은 모두 서로 다른 주파수 또는 서로 다른 도착 각도에서 만들어졌을 것이다.
만약, 모든 개개의 측정값이 특정 각도 에러보다 작다는 것이 중요하다면 최대 에러 값이 설정될 것이다.
그러나 실제의 방향 탐지 시스템에서는 (특히, 동시에 360°를 커버하는) 특정 각도와 주파수에서의 에러가 평균 에러보다 훨씬 더 큰 경우가 종종 발생한다.
그림에서 빨간 점은 실제의 에미터 위치이며 녹색 점들은 에러를 갖는 여러 측정값들을 의미한다.
이것은 실제 필드 테스트에서 항상 발생하며 낮은 레벨의 간섭 신호들 또는 점 반사체들은 시스템 자체의 성능과 무관하게 에러를 발생시킨다.
만약 이러한 최대 에러들(시스템의 내부나 외부로부터 발생하는)이 몇몇의 각도와 주파수 조합에서 발생한다면 일반적으로 이는 시스템의 작동 유효성의 공정한 테스트로 간주되지 않는다.
그렇기 때문에 보통 시스템의 효과적인 정확도로서 RMS 에러로 표현하는 것이다.
Circular Error Probable
에미터의 실제 위치를 결정하는 시스템에 대해 고려해 보자.
위치의 정확도는 CEP(Circular Error Probable)로 정의된다.
CEP는 포나 폭탄에서 사용된다.
만약 많은 포탄 또는 폭탄들이 조준 말뚝을 겨냥하고 있고 조준 말뚝으로부터 각 명중 위치까지의 거리를 측정하고 있다면, CEP는 조준 말뚝을 중심으로 하고 명중의 절반을 포함하는 충분히 큰 반지름을 갖는 원이다.
CEP가 작을수록 폭탄 정확도가 높다.
EW에서는 조금 다른 정의로 이를 사용한다.
많은 측정값들이 있고 이 값들은 잡음이나 다른 변수에 의해 에러를 가지고 있다.
여기서 원은 실제 위치를 중심으로 하고 원의 반지름은 시스템이 측정한 위치 값들의 절반이 포함하는 크기를 갖는다.
이러한 원의 반지름을 CEP라고 부르며 다음의 그림과 같다.
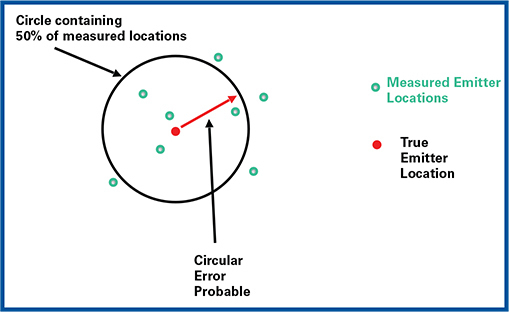
우리가 에미터 위치 시스템의 성능을 평가하고자 할 때에, 우리는 위치 정확도를 정량화하기 위해 CEP를 사용한다.
이것은 또한 50% CEP라 부르며 또는 만약 원이 에미터의 90%를 포함하고 있다면 90% CEP라 부른다.
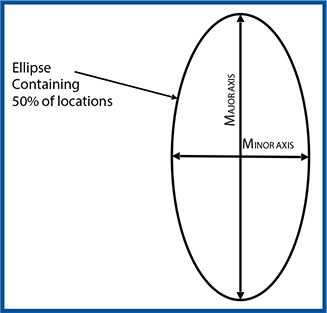
만약 측정 위치들이 타원의 형태를 갖는다면 이것을 EEP(Elliptical Error Probable)이라고 부르며 다음의 그림과 같다.
CEP는 EEP로부터 다음의 식을 통해 계산된다.
CEP = sqrt(major axis 2 + minor axis 2)
출처 : The Journal of Electromagnetic Dominance, August 2023
'Electronic Warfare > EW Technology' 카테고리의 다른 글
| 에미터 위치 탐지 기법 - (2) (1) | 2023.10.08 |
|---|---|
| 에미터 위치 탐지 기법 - (1) (2) | 2023.09.24 |
| 전자기 보호 - Home-on-Jam과 Track-via-Missile (2) | 2023.06.11 |
| 전자기 보호 - 주파수 Diversity 와 PRF Jitter (4) | 2023.05.13 |
| 전자기 보호 - Dicke Fix와 Burn-Through 모드 (2) | 2023.04.15 |




댓글