이전 파트에서는 열추적 미사일의 다양한 구성과 초기 버전의 추적 reticle에 대해 알아봤다.
이번에는 다양한 최신의 reticle들에 대해 알아본다.
다양한 추적 Reticles
이번에는 최신의 추적 reticle들에 대해 알아본다.
이러한 reticle들은 다양한 특징들을 가지고 있으나 모든 기능을 포함하지는 않는다.
중요한 것은 추적기의 FOV에서 표적의 각도 위치를 결정하는 것이 목적이며 따라서 미사일은 추적기를 표적의 광학축에 위치하도록 움직인다는 것이다.
[ Wagon Wheel Reticle ]
Wagon Wheel reticle은 회전하지는 않지만, 코니컬 스캐닝 패턴에서 움직이는 것에 더욱 우수하다.
이것은 원형 패턴 내에서 표적이 추적 윈도우를 통과하여 움직이도록 만든다.
아래의 그림과 같이 표적이 축을 벗어나 있을 때에는 센싱셀에서의 에너지가 일정하지 않은 펄스들을 갖는다.
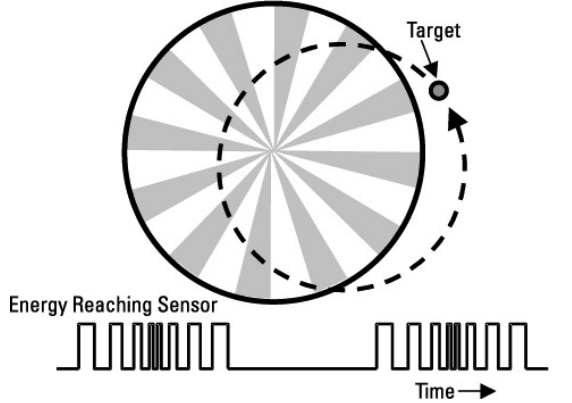
추적기의 중심에 표적을 위치시키기 위해서 추적기의 광학축은 가장 짧은 펄스의 반대 방향으로 움직여야 한다.
표적이 추적기 광학축의 중심에 있으면 다음의 그림과 같이 reticle의 투명과 반투명 부분은 일정한 구형파 패턴의 에너지를 만들게 된다.
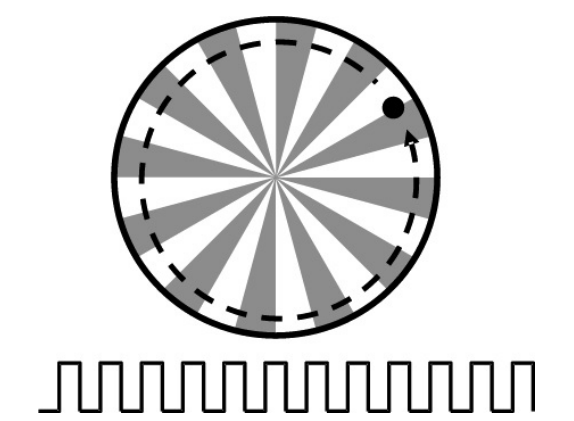
앞에서의 rising sun reticle은 표적이 추적기의 광학축으로 움직임에 따라 센싱셀로 보내지는 각 펄스의 에너지 양이 줄기 때문에 추적기가 표적을 직접 향하게 될 때에는 신호가 제로가 된다.
반면에 wagon wheel reticle은 표적이 중심에 있을 때에 강한 신호에 대한 장점이 있다.
[ Multiple Frequency Reticle ]
아래의 reticle 그림에서는 마치 rising sun reticle처럼 연속된 에너지 펄스들의 절반만 센서로 들어간다.
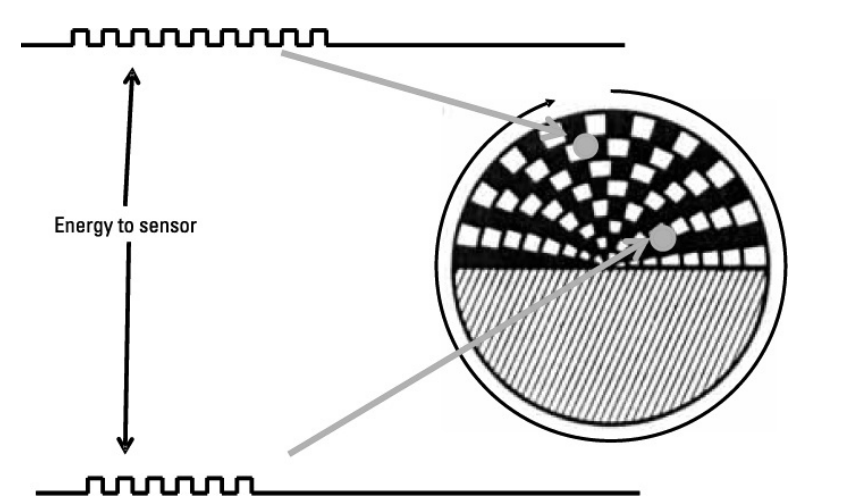
그러나 센서로 들어가는 펄스들은 표적이 reticle의 투명/반투명 영역을 통과할 때에 표적의 방향과 추적기의 광학축 간의 각도에 따라 펄스의 수가 달라진다.
추적기는 오직 단일 표적만을 추적한다.
그러나 그림은 두 개의 표적이 서로 다른 에너지 패턴을 가짐을 보여준다.
그림에서 위쪽에 있는 표적은 중심쪽에 있는 표적보다 광학축에서 더 많이 벗어나있다.
위쪽에 있는 표적에서는 9개의 펄스가 출력되고 아래쪽에 있는 표적에서는 6개의 펄스가 출력된다.
Multiple frequency reticle은 이를 통해서 추적 오차 정도를 결정할 수 있으며 정확한 조향 보정을 수행할 수 있다.
그리고 rising sun reticle과 마찬가지로 미사일이 표적을 추적기의 중앙에 위치시키기 위해 방향을 움직여야 하는 때는 펄스 패턴이 시작되는 시점부터이다.
[ Curved Spoke Reticle ]
다음의 reticle은 곡선의 바퀴살(spoke)과 크고 기능적인 모양의 불투명 영역이 있는 모양을 갖고 있다.

이 reticle은 추적기의 광학축 주변을 회전한다.
이 curved spoke는 직선의 광학적 간섭을 구별하기 위해서 설계되었다.
수평선은 밝은 선이며 다양한 물체로부터 반사를 일으켜서 추적기에는 일직선의 밝은 선으로 보여 추적 처리에 간섭을 가져올 수 있다.
불투명 영역의 모양으로 인해서 표적과 광학축 간의 각도에 따라 서로 다른 수의 바큇살을 통과하게 된다.
만약 표적이 reticle의 바깥쪽에 있다면 절반의 시간 동안 7개의 에너지 펄스를 갖게 되며 표적이 광학축 쪽으로 접근하면 에너지 펄스의 수가 증가한다.
표적이 광학축에 매우 가까이 있으면 11개의 에너지 펄스가 생성되고 거의 100%의 reticle 회전 시간동안 생성된다.
이것은 앞에서의 multiple frequency reticle과 같이 비례 유도를 가능하게 한다.
[ Rosette Tracker ]
Rosette 추적기는 다음의 그림과 같은 패턴으로 센서 초점으로 이동한다.
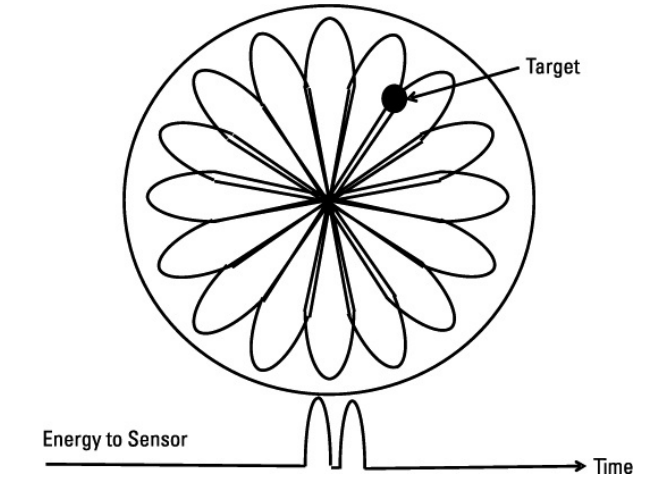
이 움직임은 서로 반대로 회전하는 두 개의 역회전하는 광학 부품을 통해 구현되며 rosette의 꽃잎(petal)의 수에는 제한이 없다.
센서가 표적의 방향으로 움직임에 따라 펄스의 에너지가 센서에 도달한다.
그림에서는 표적이 두 개의 꽃잎에 닿아 있다.
따라서 두 개의 응답 펄스가 생성된다.
광학축에 대한 표적의 위치는 이 에너지 펄스가 생성되는 시점으로 결정된다.
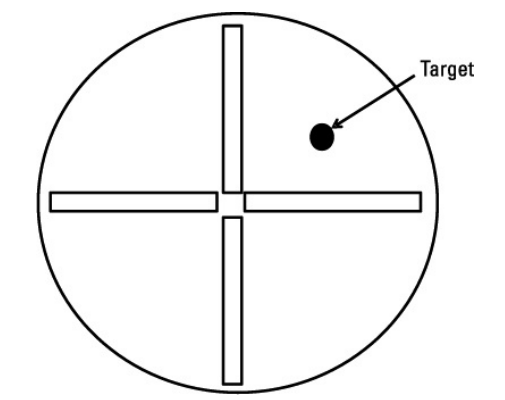
[ Crossed Liner Array Tracker ]
그림과 같은 crossed linear array는 네 개의 선형 센서를 갖는다.
표적이 각 네 개의 센서를 통과함에 따라 에너지 펄스가 생성된다.
추적기 광학축으로부터의 표적 위치는 각 센서에서 에너지 펄스가 생성되는 시점으로 결정된다.
[ 영상 추적기 (Imaging Tracker) ]
영상 추적기는 표적의 광학 영상을 만들어낸다.
다음의 그림에서, 추적기는 이차원으로 배열되어 있는 두 개의 센서를 갖거나 또는 하나의 센서가 마치 텔레비전의 카메라처럼 래스터 스캔을 한다.
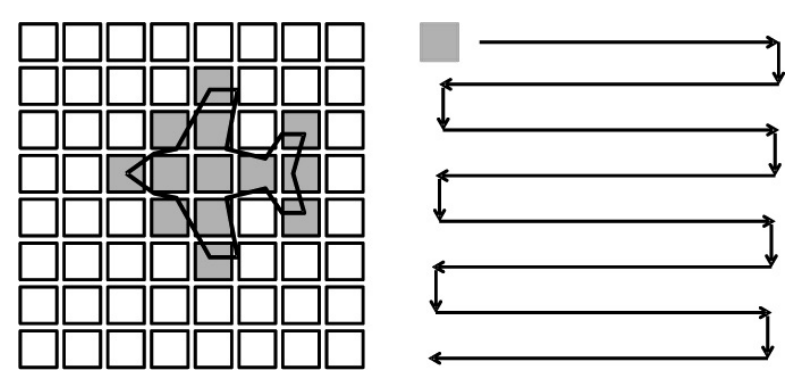
각 위치에서 픽셀을 만들어내고 프로세서는 표적의 대표적인 크기와 모양을 생성하며 광학축에 대한 상대적인 각도를 알아낸다.
모든 광학 장치들과 같이 픽셀의 수는 해상도를 결정한다.
일반적으로 영상 추적기는 상대적으로 픽셀이 적기 때문에 보통 터미널 유도 장치로 많이 생각된다.
따라서 표적을 식별하기 위해서는 충분한 픽셀을 확보해야 하고 미사일은 충분히 가까이 접근해야 한다.
몇몇의 서적에서는 대략 20개의 픽셀으로 획득거리에서의 표적 에너지를 수신할 수 있다고 한다.
그림에서 표적의 픽셀은 회색으로 되어 있다.
이는 비행기라는 그림으로써는 명확하지는 않다.
그러나 열 디코이와는 구분할 수 있다.
디코이는 보통 하나의 픽셀을 차지하며 프로세서는 이 디코이를 삭제할 수 있다.
여기까지 다양한 reticle들과 추적기에 대해 알아봤다.
다음에는 항공기에서의 발산는 열적 특성과 Flare의 운영에 대해 알아본다.
출처 : EW104
'Electronic Warfare > Study-EW 104' 카테고리의 다른 글
| 적외선 위협과 Countermeasures - (3) (1) | 2024.04.22 |
|---|---|
| 적외선 위협과 Countermeasures - (1) (1) | 2024.03.30 |
| Digital RF Memory 이론 - (7) (0) | 2024.02.19 |
| Digital RF Memory 이론 - (6) (1) | 2024.02.08 |
| Digital RF Memory 이론 - (5) (1) | 2024.01.20 |




댓글