레이다 시스템의 각 구성 요소는 특정 레이다의 기능을 결정하기도 하고 한계를 결정하기도 한다.
또한 이러한 레이다 구성 요소의 특징을 통해 특정 레이다 시스템에 대한 효과적인 대응책을 결정하기도 한다.
[펄스 레이다 시스템]
가장 일반적인 유형의 레이다 디자인은 펄스 레이다 시스템이다.
펄스 레이다는 이름에서도 알 수 있듯이 운용 주파수에서 RF 에너지를 디스크리트로 송신하는 시스템이다.
펄스가 송신되는 시간은 레이다 시스템의 펄스 반복 주파수(PRF, Pulse Repetition Frequency)를 결정한다.
펄스 레이다 시스템은 거리와 방위를 탐지한다.
표적의 방위는 펄스가 표적에 닿았을 때의 안테나의 상대적인 위치에 따라 결정된다.
다음의 그림은 기본적인 펄스 레이다 시스템의 블록 다이어그램이다.
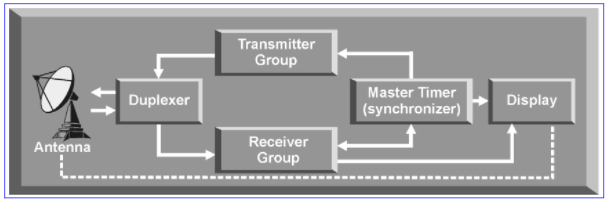
(송신기 그룹, Transmitter Group)
송신기(Transmitter)의 목적은 연속되는 고출력의 RF 에너지 burst를 안테나로 보내는 것이다.
최신의 펄스 레이다의 송신기는 일반적으로 펄스 생성기(Pulse Generator) 또는 파형 생성기(Waveform Generator), 변조기(Modulator), 그리고 파워 증폭기(Power Amplifier)로 구성된다.
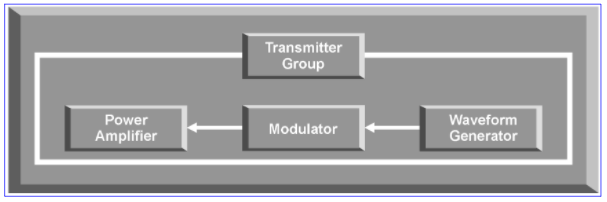
(1) 파형 생성기(Waveform Generator)
파형 생성기의 목적은 변조기 이전에 저전력의 파형이나 펄스를 생성하는 것이다.
복잡한 파형은 저전력에서 생성하는 것이 훨씬 쉽다.
이러한 복잡한 형태의 파형은 디지털 이동 표적 탐지 기법(Digital Moving Target Indicator)을 적용한 코히런트 시스템이나 펄스 도플러 레이다 운용에 사용된다.
(2) 변조기(Modulator)
변조기는 송신기의 중요 부분이라 할 수 있다.
변조기는 매우 높은 파워와 DC 전압의 매우 짧은 펄스를 파워 증폭기에 제공한다.
이것은 마치 자동차의 점화 시스템과 유사하지만 매우 엄격한 요구도를 가지고 있다.
변조기는 에너지 저장 장치와 스위치를 가지고 있다.
펄스 간 송신기의 휴지 시간 동안에 에너지는 축적되고 이 저장 장치에 저장된다.
마스터 타이머에 의해 키가 눌러지면 모든 에너지는 펄스의 형태로 파워 증폭기로 스위칭된다.
이 펄스의 파형은 파형 생성기에 의해 결정된다.
(3) 파워 증폭기(Power Amplifier)
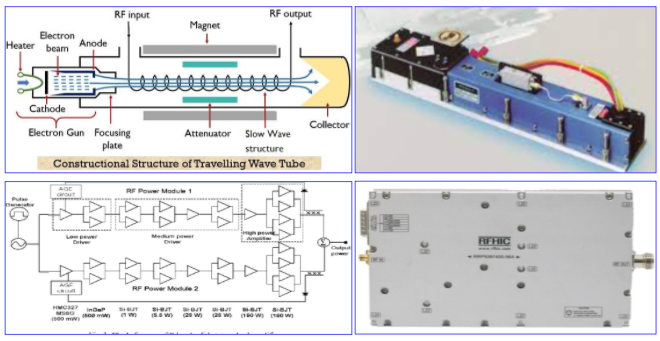
레이다의 파워 증폭기는 일반적으로 klystron, traveling wave tube, cross field amplilfier, 그리고 solid state amplifier 타입 등이 있다.
어떤 타입의 파워 증폭기를 사용하던 목적은 레이다의 운용 주파수에서 정확한 크기와 간격, 그리고 파형을 갖는 펄스 열들을 만들어내는 것이다.
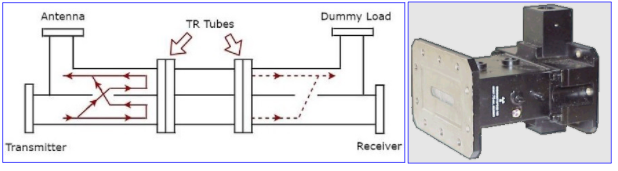
(듀플렉서, Duplexer)
듀플렉서는 하나의 안테나를 통해 송신과 수신을 할 때에 필요하다.
듀플렉서는 고출력의 송신기가 온(On) 되었을 때 민감한 수신기가 이로 인한 영향을 받지 않도록 스위칭하는 역할을 한다.
송신기가 오프(Off) 되면 듀플렉스는 약한 표적 신호를 수신기 쪽으로 스위칭한다.
듀플렉서의 목적은 전력의 손실을 최소화하고 송신 채널과 수신 채널 간의 격리도(Isolation)를 최대화하는 것이다.
송신 시에 듀플렉서 쪽에서 전력의 손실이 생기면 이는 레이다의 최대 탐지거리의 손실로 이어진다.
격리도는 듀플렉서를 통해 송신기의 전력이 수신기로 흘러들어 가는 양을 말한다.
이것은 수신기의 포화나 고장을 피하기 위해 반드시 아주 작아야 한다.
(수신기 그룹, Receiver Group)
수신기 그룹은 레이다의 주요 성능과 연관되어 있다.
레이다 수신기가 표적 반사 신호를 탐지하고 원하는 정보를 추출하는 능력은 주로 잡음에 의해 제한을 받는다.
잡음은 표적 반사 신호와 함께 안테나를 통해 수신기로 들어간다.
이러한 종류의 잡음을 외부 잡음이라고 한다.
수신기 내부에서 발생하는 잡음은 열잡음(Thermal Noise)이라고 부른다.
레이다의 잡음은 완벽히 제거할 수는 없다.
최근 레이다에 적용되는 민감한 수신기 설계에서는 이 잡음을 최소화하기 위한 노력을 하고 있다.
게다가 이러한 잡음에 강한 수신기 설계는 레이다 시스템이 재밍으로부터도 강한 성능을 갖는다.
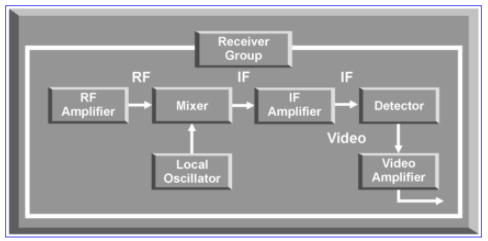
대부분의 펄스 레이다 수신기는 수퍼헤데로다인(superheterodyne) 수신기이다.
이 수퍼헤테로다인 수신기는 RF 증폭기(RF Amplifier)와 믹서(Mixer), 국부 중간 주파수 증폭기(Local Intermediate Frequency Amplifier), 디텍터(Detector), 그리고 비디오 증폭기(Video Amplifier)로 구성된다.
레이다의 표적 반사 신호는 안테나와 듀플렉서를 통해 수신기로 들어온다.
이 신호는 매우 약한 신호이기 때문에 RF 증폭기가 신호의 이득을 높여주어야 하며 필터를 통해 가능한 많은 양의 외부 잡음을 제거한다.
증폭된 신호는 믹서로 보내지며 여기서 IF 대역의 신호로 하향된다.
이는 국부 발진기(Local Oscillator)에서 만들어진 신호와 RF 신호가 합쳐져서 만들어지며 이렇게 IF로 하향된 신호는 처리하기가 더욱 용이해진다.
IF 증폭기에서는 IF 신호가 증폭되고 정합 필터(Matched Filter)를 포함하고 있어서 최대의 신호대 잡음 비로 만들어진다.
이를 통해 표적 반사 신호 탐지가 가능하다.
디텍터는 IF 신호로부터 비디오 변조를 추출하거나 또는 IF 신호를 비디오 신호로 변환시킨다.
(마스터 타이머, Master Timer)
기본적인 펄스 레이다의 머리 역할을 하는 것이 마스터 타이머 또는 싱크로나이저(Synchronizer)라 할 수 있으며 레이다의 각 요소의 동작을 조정한다.
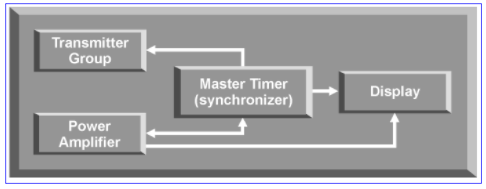
레이다 내부에서의 정확한 타이밍은 정확한 거리 탐지를 위해 반드시 필요한 요소이다.
마스터 타이머는 오실레이터이며 송신기가 펄스를 송신하도록 트리거링을 시킨다.
동시에 마스터 타이머는 디스플레이 시작을 위한 신호를 보내어 거리와 방위 정보가 정확하게 디스플레이되도록 한다.
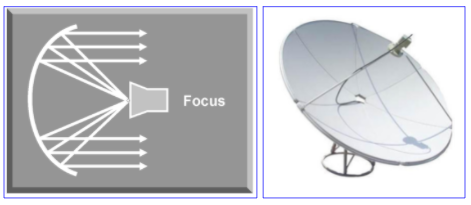
(안테나, Antenna)
레이다 신호 송신 동안에 안테나의 역할은 원하는 방향으로 레이다 에너지를 집중시키는 것이다.
수신 동안 안테나의 역할은 표적 반사 신호를 포함하고 있는 되돌아오는 레이다 에너지를 모아서 수신기로 보내는 것이다.
안테나의 특성과 스캔 방식에 대한 내용은 다른 챕터에서 더욱 상세히 얘기할 예정이다.
(디스플레이, Display)
레이다 디스플레이의 목적은 수신기 그룹에서 나온 레이다 표적 정보를 운용자에게 보여주는 것이다.
레이다의 목적과 어떻게 레이다 정보가 사용되냐에 따라 다양한 종류의 스코프가 있다.
여기서는 크게 4가지의 기본적인 레이다 디스플레이에 대해 얘기하겠다.
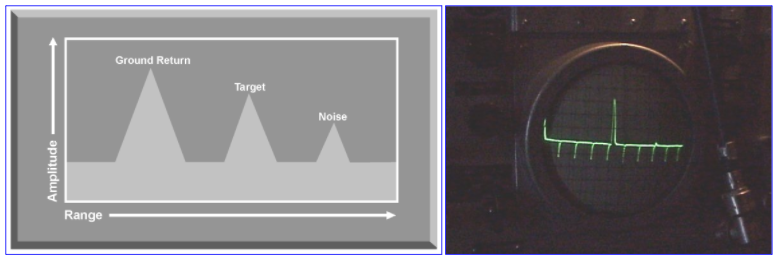
(1) A 스코프(A Scope)
A 스코프는 표적의 거리와 속도를 보여줄 때 사용된다.
A 스코프를 사용하는 위협 시스템에는 거리만을 탐지할 수 있는 레이다를 탑재한 공중 요격기나 지대공 미사일(SAM, Surface-to-Air Missile), 레이다 유도식 대공포(Radar-directed AAA, Anti-Aircraft Artillery) 시스템이 있다.
SAM과 AAA 시스템은 거리나 속도 정보를 위한 A 스코프를 이용하고 다른 레이다 디스플레이로는 방위와 고도 정보를 시현한다.
A 스코프는 거리나 속도를 크기에 대해 시현한다.
운용자는 지상이나 잡음과 같은 다른 반사 신호로부터 표적 반사 신호를 구분해야 한다.
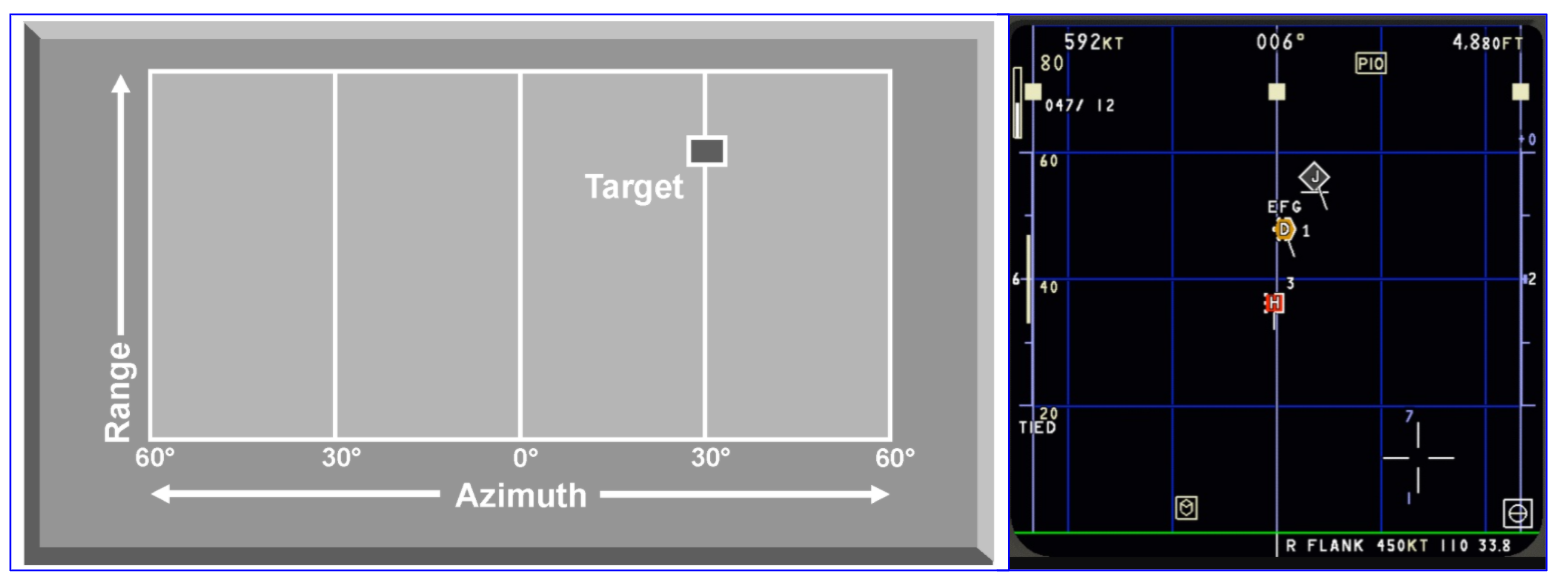
(2) B 스코프(B Scope)
B 스코프는 표적의 거리와 방위를 표시할 때 사용된다.
위협 시스템의 경우에는 AI나 SAM 시스템에서 이 B 소코프를 사용한다.
표적 반사 신호가 화면을 중심으로 왼쪽 또는 오른쪽에 위치하는 것은 표적의 방위를 나타낸다.
또한, 표적 반사 신호가 화면의 바닥에 위치하면 표적과의 거리가 0 임을 나타내는 것이다.
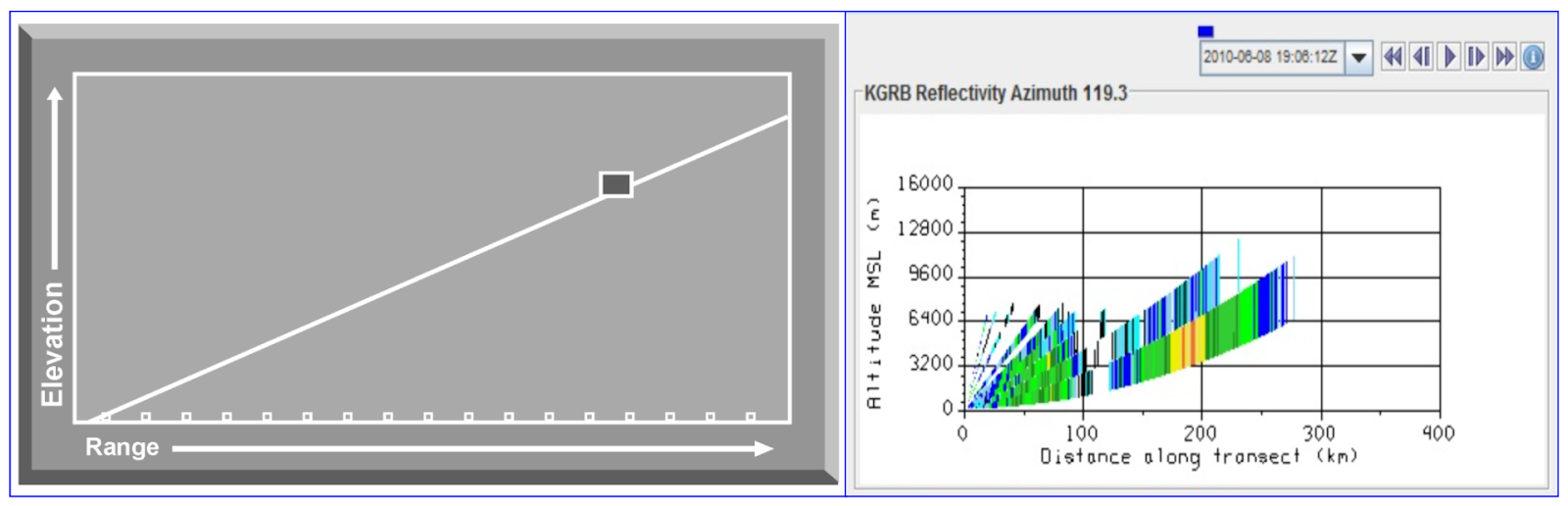
(3) RHI 스코프
RHI 스코프는 표적의 거리와 고도를 표시할 때 사용된다.
이 RHI 스코프는 고도 탐지 레이다에서 사용되며 변형된 RHI 스코프는 GCA(Ground-Controlled Approach) 레이다에서 사용된다.
디스플레이의 스윕을 통해 부채꼴 모양을 남긴다.
안테나는 위아래로 스윕을 하고 화면의 업데이트와 동기화된다.
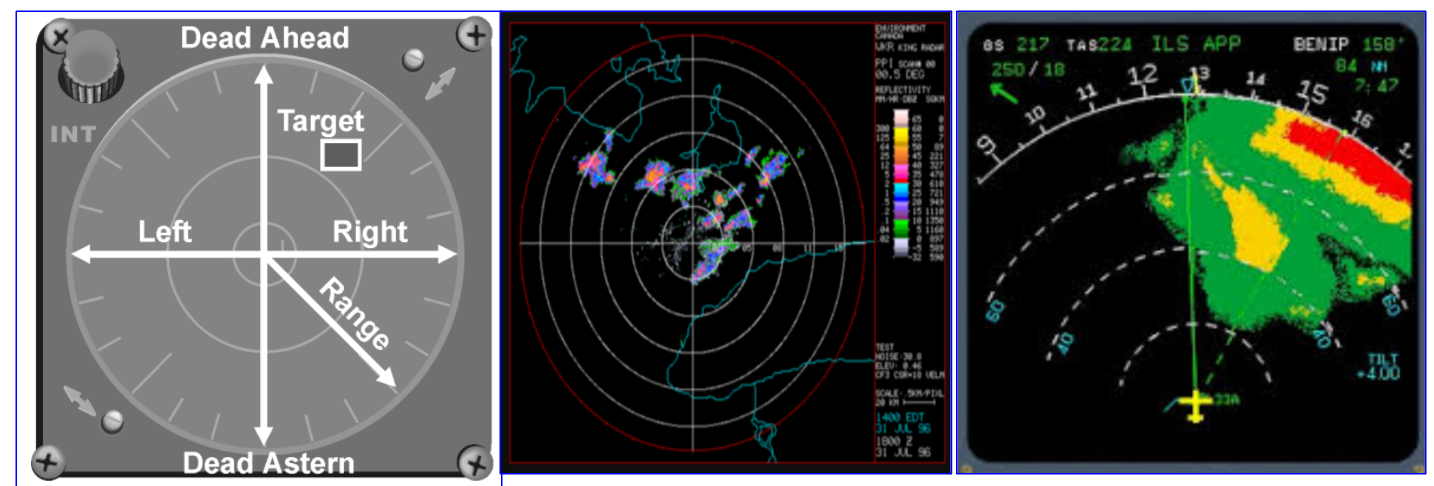
(4) PPI 스코프
PPI 스코프는 아마도 가장 널리 알려진 레이다 디스플레이일 것이다.
PPI 스코프는 주로 360도를 레이다 빔이 스캔하여 특정 지역의 맵을 보여준다.
이 PPI 스코프는 조기 경보, acquisition, GCI(Ground-Controlled Intercept), 그리고 SAM 레이다 시스템에서 사용된다.
표적 반사 신호의 각 위치는 표적의 방위를 보여주며 화면 중심으로부터의 거리는 표적의 거리를 나타낸다.
[연속파 레이다 (CW, Continuous Wave Radar)]
CW 레이다의 송신은 일반적으로 2개의 분리된 안테나가 필요하며 하나는 송신을 위한 안테나이고 다른 하나는 수신을 위한 안테나이다.
연속파 송신으로 인해 표적 반사 신호도 연속적으로 수신되므로 특정 송신 시점에 의한 반사 신호를 구분할 수 없다.
그렇기 때문에 시간을 기반으로 한 표적 거리 정보 획득이 불가하다.
그러나 도플러 효과를 이용하여 CW 레이다는 표적을 추적할 수 있다.
움직이는 표적에 반사된 신호의 주파수는 표적의 레이다 방향으로의 각속도 양만큼 비례하여 변경된다는 도플러 원리를 통해 송신된 신호와 수신된 신호의 주파수 차이를 구분하여 CW 레이다는 클러터로부터 표적을 분리해 낼 수 있다.
이러한 형태의 레이다를 CW 도플러 레이다라고 한다.
다음의 그림은 기본적인 CW 도플러 레이다를 설명하고 있다.
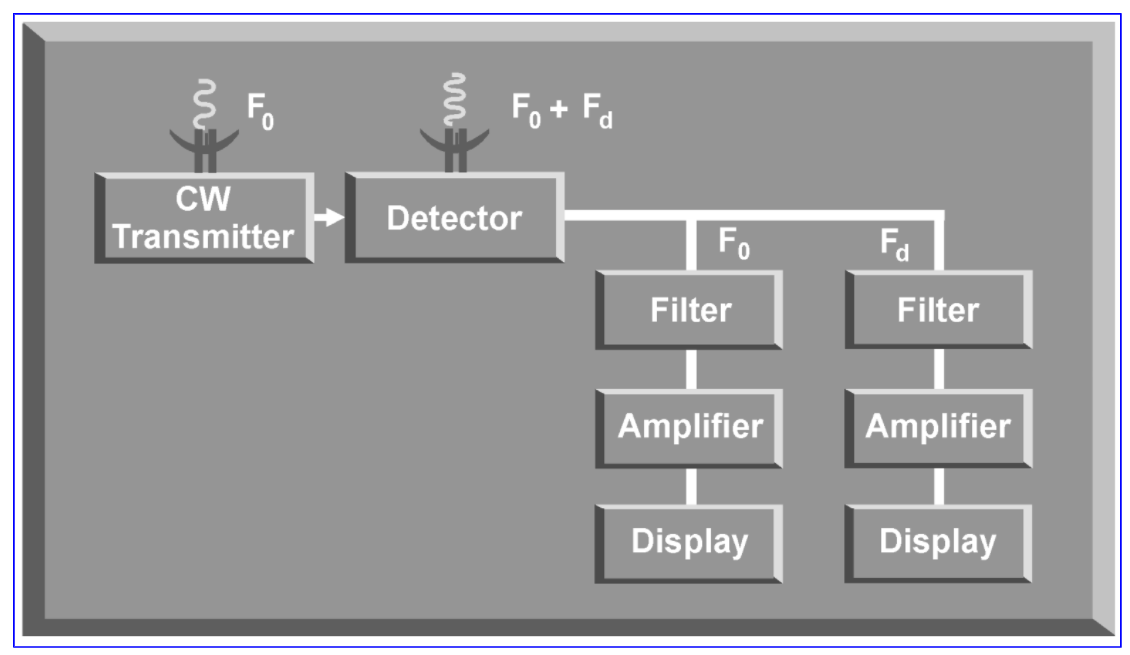
단순한 CW 도플러 레이다에서 송신기는 운용 주파수 대역에서 연속파를 송신하고 이 신호는 움직이는 표적에 반사되어 수신 안테나로 들어온다.
반사된 신호의 주파수 fd는 도플러 원리에 의해 주파수가 변경되었다.
이 표적 반사 주파수는 디텍터로 들어가고 송신할 때의 주파수 fo 또한 기준 신호로서 이 디텍터에 입력된다.
디텍터는 송신 신호와 수신 신호 간의 주파수 차를 감지하여 그 결과를 도플러 필터 뱅크로 보낸다.
도플러 필터 뱅크는 각각의 필터가 고유한 특정 주파수 변위 값만을 통과시킨다.
그렇기 때문에 통과된 도플러 필터의 번호는 레이다가 탐지해낸 표적의 속도가 된다.
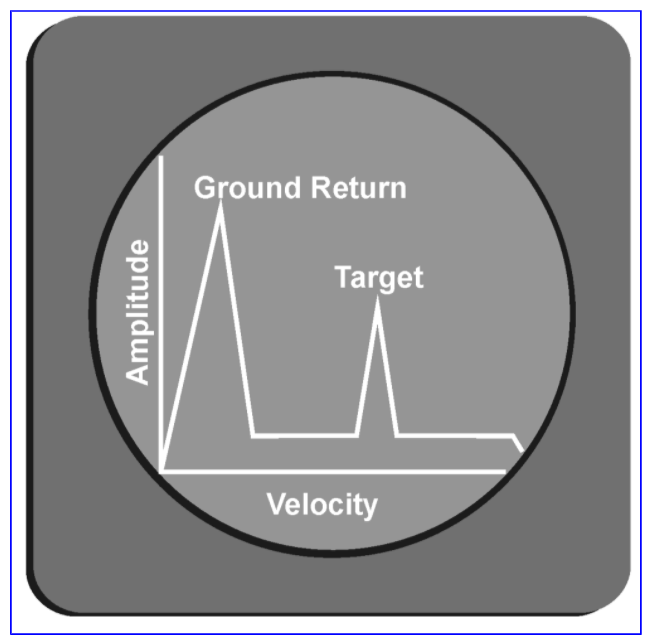
각 도플러 필터의 출력 값은 증폭되고 디스플레이의 각 영역에 표시된다.
아래의 디스플레이는 속도와 크기로 표시되는 A 스코프 형태이다.
[펄스 도플러 레이다]
펄스 도플러 레이다는 펄스 레이다와 도플러 레이다 시스템의 장점을 더해놓은 레이다이다.
신호는 펄스이기 때문에 레이다는 표적의 거리, 방위, 그리고 고도를 탐지할 수 있다.
펄스 도플러 레이다는 개별 펄스 기반으로 레이다 시스템에 대한 표적의 접근율 또는 멀어지는 속도를 계산할 수 있다.
펄스 도플러 레이다는 또한 다중 PRF를 사용하여 표적의 모호성을 없앨 수 있으며 medium PRF를 통해 거리 정보를 획득할 수 있다.
펄스 도플러 레이다의 가장 큰 장점은 지상 클러터를 제거하고 표적의 거리와 방위, 속도에서 높은 해상도를 제공한다는 것이다.
펄스 도플러 레이다는 운용 주파수 대역에서 코히런트 RF 에너지를 펄스 형태로 송신한다.
이 펄스 안의 주파수는 CW 레이다의 연속파와 같은 방식으로 동작한다.
그러나 RF 파가 펄스 형식이기 때문에 표적으로부터 반사된 펄스의 시간 정보를 추출하여 거리 정보를 획득할 수 있다.
속도는 펄스 안 주파수의 도플러 편이 양을 계산하여 획득할 수 있다.
코히런트 펄스 도플러 레이다의 기본적인 구성은 아래의 그림과 같으며 exciter와 레이다 컴퓨터, 그리고 디지털 신호 처리기가 추가된 것을 제외하면 일반 펄스 레이다와 유사하다.
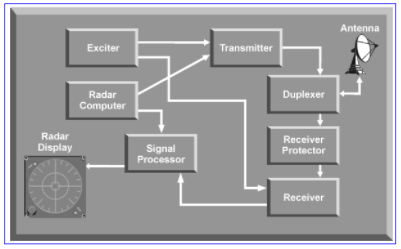
Exciter는 송신을 위한 특정 주파수와 위상을 갖으며 연속적이고 매우 안정적인 저전력의 신호를 생성한다.
또한, 이 신호는 수신기로도 입력되어 기준 신호로 사용된다.
디지털 신호 처리기는 표적의 속도와 거리 정보를 바탕으로 표적을 탐지, 추적, 구분하는데 요구되는 연산 기능을 수행한다.
레이다 컴퓨터는 항공기의 비행 파라미터 계산이나 레이다 모드 변경과 같은 레이다의 일상적인 기능을 수행한다.
[모노펄스 레이다 (Monopulse Radar)]
모노펄스 레이다의 주요 기능은 표적의 추적과 무장의 유도 기능이다.
모노펄스 레이다는 재밍에 취약한 스캐닝 레이다 시스템의 한계를 극복하기 위해 개발되었다.
모노펄스 레이다는 일반적으로 표적에 반사되는 레이다 에너지를 서로 다른 영역을 바라보고 있는 두 개, 세 개 또는 네 개의 분리된 수신기 또는 채널로 수신한다.
각 수신기로 수신된 반사 신호를 비교하여 추적 에러를 결정할 수 있다.
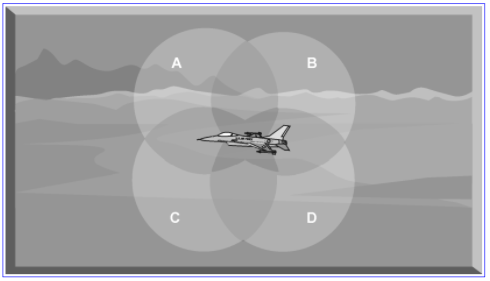
예를 들면, 아래의 그림과 같이 레이다는 각 채널에서의 신호 크기나 강도를 비교하다.
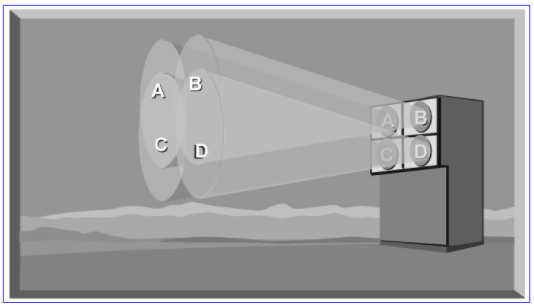
‘A’ 위치에 있는 항공기는 그 방향에 집중하고 있는 ‘A’ 수신기에서 가장 강한 반사 신호를 생성한다.
신호의 강도를 통해 위치를 추적하는 이러한 종류의 레이다 시스템은 일반적인 잡음 재밍이 오직 항공기가 있는 위치에서만 탐지된다.
다른 코히런트 레이다는 위상차를 측정할 수 도 있다.
만약 신호가 안테나의 정면에서 온다면 각 사분면은 정확히 같은 시간대에 신호가 수신될 것이고 그러므로 모든 위상도 동일하다.
그러나 반사 신호가 중심에서 벗어나 있다면 반사된 신호는 안테나 정면에서 약간 반대편으로 치우쳐서 수신되고 이는 각 사분면에서 서로 다른 위상차로 측정된다.
이러한 위상차는 표적의 방위 에러를 결정하는 데 사용된다.
모노펄스 레이다는 각 송신 빔에서 수신된 신호의 크기나 위상을 비교하여 동작한다.
Magic T라고 불리는 복잡한 형태의 비교기 회로는 전기장 E-plane 또는 자기장 H-plane 중심을 기반으로 수신된 신호를 더하거나 빼는 연산을 수행한다.
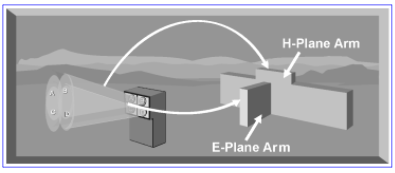
안테나 A로 수신된 신호는 H-plane에 있는 magic T로 들어오고 반면에 안테나 B로 수신된 신호는 E-plane에 있는 magic T로 들어온다.
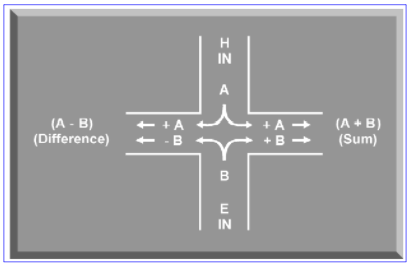
아래의 그림은 magic T의 출력을 나타낸다.
이 출력은 두 입력 신호의 합과 차이다.
이러한 신호의 크기나 위상에 있어서 합 또는 차 값은 표적의 방위 방향 에러나 고도 방향의 에러를 계산하는 데 사용된다.
Magic T에 의해서 계산된 신호의 합과 차 신호는 모노펄스 레이다의 추적기로 전달되어 모노펄스 안테나의 중심을 표적에 일치시키기 위해 표적의 방위 방향 에러와 고도 방향 에러를 수정하는 동작을 한다.
표적의 거리는 송신 신호의 시간과 수신된 표적 반사 신호의 시간을 계산하여 획득하며 이 거리 정보는 거리 추적을 위해 운용자에게 시현된다.
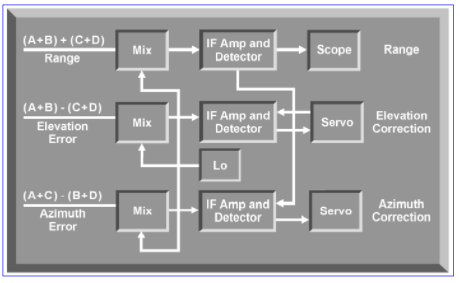
각 안테나 A, B, C, 그리고 D에서 수신된 신호가 동일하면 표적은 레이다 빔의 중심에 위치하고 있는 것이다.
위쪽 두 개의 빔 인 A와 B의 합과 아래쪽 두 개의 빔 C와 D의 합 간의 차를 통해 표적 고도에 대한 에러를 산출하며 유사하게 좌측의 빔 A와 C의 합과 우측의 빔 B와 D의 합 간의 차를 통해 표적 방위 방향의 에러를 산출하는 것이다.
모노펄스 레이다 추적기는 이 에러를 보상하여 계속해서 표적의 반사 신호가 빔의 중심에 위치하도록 시도를 하면서 표적을 추적한다.
다음 챕터부터는 레이다 원리에 대해 좀 더 깊게 소개될 예정입니다.
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS]-1부 (4) | 2022.01.16 |
|---|---|
| [CHAPTER 5. RADAR PRINCIPLES] (7) | 2021.12.26 |
| [CHAPTER 3. RADAR SIGNAL CHARACTERISTICS] (5) | 2021.12.11 |
| CHAPTER 2. CHARACTERISTICS OF RF RADIATION (7) | 2021.11.24 |
| CHAPTER 1. INTRODUCTION TO RADAR (1) | 2021.11.10 |




댓글