배에서 발사되는 대응책 즉, RF 채프나 IR 카트리지, RF 코너 리플렉터, 그리고 능동형 오프보드 디코이등은 대함 미사일에 대한 방어책으로 오랜 기간 개발되고 활용되어 왔다.
방어를 위해 배에서 적절한 거리와 각도로 발사된 이러한 소모성 소프트-킬(soft-kill) 장치들은 표적 솔루션을 혼란시키거나 탐색 단계로 접근하는 대함 미사일의 시커를 교란, 또는 미사일의 최종 단계에서 추적 해제(break lock)를 위한 유인 기능 등을 통해 적의 “킬 체인(kill chain)”을 깨뜨리도록 설계되었다.
그러나 이러한 소프트-킬 시스템들은 모두 다음 세 가지의 주요 제한 사항을 가지고 있다.
첫 번째는 시스템이 작동 시 반응적 이라는 것이며 이것은 위협을 감지하고 시스템이 시작하며 발사가 이루어지고 비행하고 페이로드를 전개 또는 효과를 보는데 까지 피할 수 없는 지연이 발생한다는 것을 의미한다.
두 번째는 디코이 페이로드를 정확한 시간과 지점에 위치하게 함으로써 시커의 시야 안에서 신뢰성 있는 반응을 만들어내야 하는데 이러한 것이 매우 복잡하다는 것이다.
세 번째는 디코이의 효과 유지 시간이 보통 수십 초에서 수 분 정도로 비교적 짧다는 것이다.
속도나 스텔스, 또는 시나리오의 복잡성 때문에 ASMD(Anti-Ship Missile Defense) 경고 시간은 더욱 줄어들며 일제 공격에 대한 잠재적인 위험성이 증가함에 따라 대안적인 소프트-킬과 하드-킬 전략으로 계층적인 방어체계를 개발할 필요가 있다.
이러한 전자 디코이 페이로드 개발의 중요한 한 가지는 장시간 비행이 가능한 탑재체를 개발하여 더욱 길게 효과를 유지하는 것이다.
적절한 전자전 명령 및 지휘 체계와 결합된 지상 무인 플랫폼이나 공중 플랫폼 모두를 개발하는 것은 이제 가능할 전망이다.
이제 도전 과제는 탑재체와 페이로드 기술을 성숙시키고 강건한 명령 및 지휘 체계의 개발 그리고 이와 연계한 전술/교리의 개발이다.
[미국, FLYRT]
사실 장시간을 유지하는 EW 페이로드 탑재체 개발을 위한 노력은 수년 전부터 있었다.
예를 들면, 미 해군 NRL(Naval Research Laboratory)의 전술 전자전 부서는 ONR(Office of Naval Research)의 지원을 받아 1990년도 초에 잠재적인 기술 솔루션에 대한 위험도 감소와 시연을 위한 연구와 개발을 시작하였다.
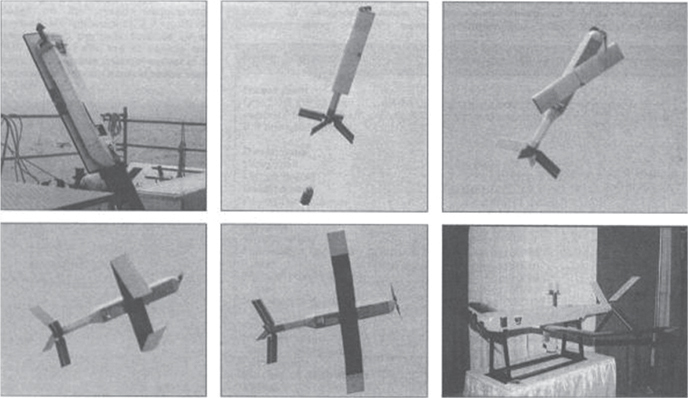
이러한 ATD(Advanced Technology Demonstration) 프로젝트의 첫 번째는 FLYRT(FLYing Radar Target)이며 이는 접이식 무인 항공기로 설계되었고 소형의 로켓 부스터를 이용하여 표준 Mk36 발사대에서 발사되며 발사 후 비행면을 펼치고 동력 비행으로 전환하여 배와 같은 속도로 비행한다.
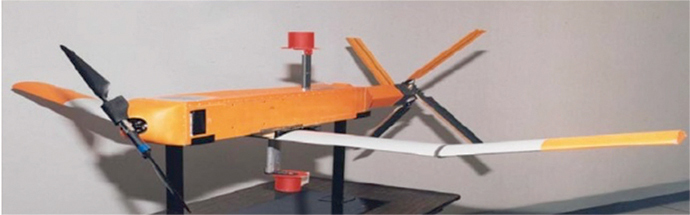
FLYRT는 1991년과 1993년에 걸쳐 테스트된 첫 번째 함상 발사 EW 소모성 공중 플랫폼이다.
전기 추력을 이용하고 NRL에서 개발한 광섬유 자이로스코프를 가지고 있었으며 특정 소프트-킬 전략을 상세히 분석할 수 있도록 상세한 미사일 모델이 포함된 디코이 시뮬레이터에 처음으로 모델링 되었다.
그리고 1993년 9월에 이 디코이 성능에 대한 전반적인 시연이 수행되었다.
[미국, Eager]
FLYRT의 뒤를 이은 Eager는 복구가 가능하고 묶여진 기동을 하며 전기적 파워의 회전익 탑재체이며 1994년에서 1996년 진행된 ATD의 한 부분으로 NRL에서 개발한 RF 리피터를 탑재하고 있다.
Eager의 운용 개념은 잠재적인 교전 지역에 진입하기 전에 배치되어 접근하는 미사일의 첫 레이다 펄스를 탐지하는 것이다.
이것은 위협이 탐지되기 전까지 배치되지 않는 반응형 소프트-킬과 대조적이다.
Eager 탑재체는 1997년에 연속적인 6시간 동안의 자동 비행을 시연하였다.
이 페이로드의 효과도 측정은 1997년 후반에 수행되었다.
ONR의 지원하에 NRL의 이후 노력은 무인 수상함에 탑재하는 DRFM 기반의 전자 공격 페이로드의 개발과 시연이었다.
이 장치의 시연을 위해 NRL은 원격 제어의 11m 수중익선 USV인 HS-USSV(High Speed Unmanned Sea Surface Vehicle)에 페이로드를 통합하였다.
HS-USSV에 통합된 전자 공격(EA)의 초기 시험은 2007년 8월에 수행되었다.
해안의 대함 미사일 시뮬레이터를 이용하여 배 표적을 추적하고 시험을 통해 위협 레이다 시커로부터 추적당하는 것을 피하는 효과적인 위치 값들을 평가하였다.
NRL에 따르면 이 평가를 통해 EA를 수행한 무인 수상 플랫폼은 일반적인 재밍 파형을 이용하여 배가 레이다로부터 추적당하는 것을 막았다고 한다.
이어지는 후속 시험에서는 감시에 대응하는 성능을 평가하였다.
[미국, AOEW와 NOMAD]
AOEW(Advanced Offboard Electronic Warfare) 프로그램은 2012년 미 해군에 의해 시작되었으며 현재 그리고 미래의 대함 미사일 위협에 대항한 EW 임무에 사용하기 위해 새롭게 장시간 운용이 가능한 오프보드 대응책 능력을 개발하는 것이다.
무인 탑재체에 탑재하는 것을 심각하게 고민하는 동안 미 해군은 2014년 MH-60R과 MH-60S 헬리콥터에 고감도 수신기와 EA 시스템을 갖는 자체 EW 포드를 통한 AOEW 요구사항 수행을 발표했다.
Lockheed Martin사는 AN/ALQ-248 포드를 개발했으며 많은 엔지니어링 모델을 통해 시험과 인증을 수행하고 있다.
2021년 9월 초도 양산 계약을 체결했다.

[미국, SEWEED와 NOMAD]
AOEW를 위한 플랫폼을 유인 탑재체를 선택했음에도 미 해군의 마음속에는 무인 및 자동의 장시간 EW 디코이 비행 탑재체가 남아있었다.
2015년으로 거슬러 올라가면 NRL은 선박 발사형 EW 소모성 디코이(SEWEED, Ship-Launched EW Extended Endurance Decoy)의 빠른 반응시간을 더욱 성숙시키기 위한 FNC(Future Naval Capability) S&T 노력을 공개하였다.
여기서 제안된 개념은 빠른 전개와 위치 고정을 위해 로터 기반의 비행 전환을 하는 로켓 발사형 소모성 플랫폼이다.
이 SEWEED FNC의 핵심 기술은 EW 호환의 안테나 격리를 위한 플랫폼 표면 처리와 기골의 형상 및 재질과 페이로드의 열관리, 개선된 제어 알고리즘을 포함한다.
이 프로젝트는 또한 swashplate가 없는 로터와 회전익의 빠른 전개와 같은 파워 및 추진 측면도 연구하였다.
그러나 SEWEED의 노력은 초도 설계 종료 이후로 더 진행되지 못했다.
임무와 페이로드 기술이 발전함에 따라 NRL은 페이로드의 SWAP(Size, Weight and Power)과 전체적인 SEWEED 탑재체의 크기는 크게 감소될 수 있다는 결론을 내렸다.
대신에, NRL의 VRC(Vehicle Research Center)는 ONR의 NEMESIS(Netted Emulation of Multi-Element Signatures Against Integrated Sensors) INP(Innovative Naval Prototype) 개발 프로그램의 일환인 NOMAD(Netted Offboard Miniature Active Decoy) 저비용 회전익 미니 UAV를 개발하고 테스트하였다.
NEMESIS INP는 EW 동기화를 통해 다양하게 분산되어 있는 플랫폼 전체에 효과를 줄 수 있는 시스템의 시스템(system of system)을 개발하는 것으로써 동질 및 일관된 EW 응답을 생성하여 적의 감시와 조준 시스템을 교란시키는 것이다.
모듈식이면서 형상을 바꿀 수 있는 EW 페이로드를 개발하는 것뿐만 아니라 이 프로그램은 또한 디코이와 무인 공중 및 수상 플랫폼, EW 기능의 개발, 그리고 자동화 디코이, 네트워킹, 대응책 조정 기술까지 포함된다.
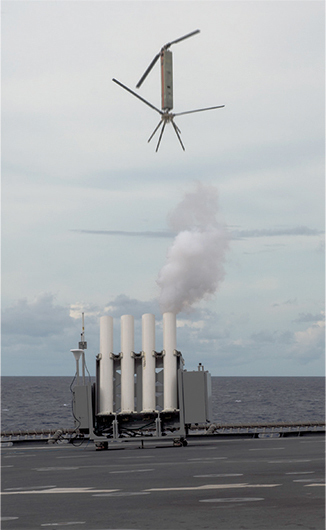
NRL이 개발한 튜브 발사식 NOMAD 탑재체는 단일 또는 다중의 디코이를 “둥지”식으로 조합할 수 있으며 세로 방향으로 연장되는 몸체의 양쪽 끝에 있는 접이식 역회전 동축 로터가 특징이다.
소프트 발사의 CO2 발사 시스템은 탄을 배출하는 데 사용된다.
첫 번째 해상 NOMAD 발사는 2016년 RIMPAC 훈련의 일환으로 유도 미사일 구축함 USS Pinckney에서 수행되었다.
시험에서 공중 탑재체는 기대했던 지속시간보다 2배가 넘는 30분 동안 비행을 완수하였고 NOMAD는 8 nmi 이상 배를 따라갈 수 있었다.
추가적인 NOMAD 시험은 2017년 8월 Littoral 전투함 USS Coronado에서 수행되었다.
이 시험에서 여러 개의 NOMAD 탑재체가 빠르면서 연속적으로 발사되었고 포메이션 비행을 하였으며 배에 순차적으로 회수되었다.
이것은 NOMAD 다중 발사/회수 기술을 미 함정에서 처음으로 시험한 것이다.
[미국, LEAP과 LEEP]
이러한 시연에 이어서 2019년 ONR은 AN/ALQ-248 포드를 보완하기 위한 후속 기능의 기반으로서 LEAP(Long Endurance Advanced Off-board Electronic Warfare Platform)를 위한 특별 프로그램을 발표하였다.
핵심이 되는 목표 요구도는 다음을 포함한다.
- DDG-51 Arleigh Burke급 구축함의 갑판 공간 안에서 최대 수량의 디코이 발사가 가능토록 하는 발사대 조립체
- 배로부터 안전하고 안정적인 분리를 제공하면서 전개부터 안정적인 자세 유지까지의 비행 제어
- 충돌 방지와 발사 시 임무를 받아들일 수 있는 능력, 배의 제어 스테이션으로부터 웨이 포인트 업데이트를 받아들이는 능력
- 위협에 집중하기 위해 재배치 및 재배열이 가능한 능력을 포함한 자동 비행 제어 기능
- GPS가 거부된 환경에서 공중과 해상 플랫폼 인식 기능을 갖춘 선박 기준 항법
- 스테이션에서 최소 1시간 이상의 비행 유지 능력
- 주 센서인 RF와 EO/IR 도메인에서 모두 모듈 방식의 EW 페이로드 적용
- Sea State 5 이상(20kt 이상의 바람)에서의 운용
- 디코이와 제어 스테이션 간의 안전한 양방향 통신 시스템
RF와 EO/IR 대역 모두에서 LEAP 페이로드 개념 개발을 위해 다수의 작은 규모 연구가 진행되었으며 BAE Systems사, Raytheon사, 그리고 Lockheed Matin사 모두 계약을 체결하였다.
이후 LEAP의 노력은 잠잠해졌지만 2020년 10월 미 해군은 LEED(Long-Endurance Electronic Decoy) 프로그램 추진을 발표했다.
미 해군의 2022년도 예산 요청에 따르면 LEED는 소모성 장시간 자동 오프보드 디코이 대응책 시스템을 납품할 것이며 여기에는 비행체와 모듈식 RF 페이로드를 포함한다고 한다.
또한 예산 문서에는 LEED가 AN/SLQ-32 EW 시스템과 통합될 것이며 적과의 교전 시간을 증가시키고 서로 다른 기종의 미사일 공격에 대응하는 능력을 포함하여 함대에 강화된 EW 능력을 제공할 것이라고 기술하고 있다.
LEED 대응책 개발 단계 1은 2022년에 시작할 계획이며 운용 레벨의 대응책 프로토타입을 경쟁적으로 개발하여 비행 성능과 RF 기능을 포함한 중요 능력에 대한 시연을 수행할 것이라고 한다.
2단계에서는 1단계에서의 핵심 기술을 바탕으로 양산을 대표하는 EDM(Engineering Development Model)을 개발한다.
LEED는 ONR의 LEAP 노력(현재는 Long-Endurance Airborne Platform으로 이름이 바뀌었음)과 함께 개발될 것이며 이 동일한 노력하에 개발된 기술을 활용할 것이다.
[캐나다, 또 다른 NOMAD]
캐나다 해군의 EA 능력을 재편성하기 위한 여러 노력 중 하나인 NEAR-U(Naval Electronic Attack Recapitalization-Unmanned) 프로젝트는 기존의 USV 플랫폼에 EW 페이로드를 통합하여 해상 플랫폼의 생존성을 향상하는 잠재적인 솔루션을 개발하고 시험하는 것을 목표로 한다.
이 시스템 역시 NOMAD의 용어를 사용하지만 풀네임은 Naval Off-Board anti-Missile Active Decoy이며 오프보드 능동형 디코이나 재머를 개발 및 평가하고 또한 레이다 테스트와 훈련을 위한 EW 테스트 기능도 수행한다.
2019년 5월, Rheinmetall Canada는 450만 캐나다 달러의 계약을 하고 NOMAD 프로젝트를 이끈다.
이 계약을 통해 회사는 QinetiQ Target Systems’ Humpback USV에 EW 페이로드를 통합한 2대의 NOMAD 시스템을 납품한다.
2019년 10월에는 이 프로그램을 위해 이스라엘의 Elbit Systems사가 Rheinmetall Canada사에 DRFM기반의 EW 페이로드를 공급하는 계약을 하였다.
이 시스템은 동기 또는 비동기 재밍과 광대역 잡음 재밍, 잡음 커버 펄스, 거리 기만 재밍, 그리고 다중의 거짓 표적 생성 등을 포함한 여러 EA 기법을 생성할 수 있다.
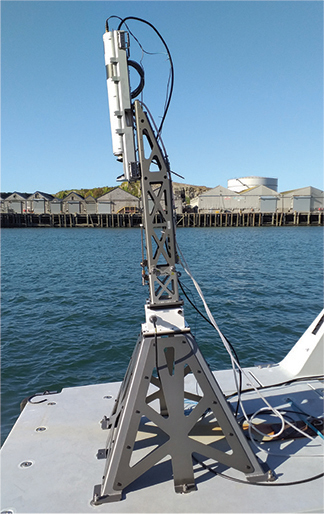
USV와 NOMAD 시스템은 발사와 회수 그리고 원격 제어가 가능하게 설계되었으며 frigate와 같은 더 큰 선박에서 가시선을 유지하여 2,000m 이상의 거리에서 제어가 가능하다.
발사 전 NOMAD 시스템의 mast와 mast가 장착된 구성품은 USV에 탑재된다.
회수 시에는 NOMAD 시스템과 USV는 바다에서 회수되며 호스트 배에서는 mast와 mast가 장착된 구성품을 USV에서 제거하고 다음을 준비하기 위해 보관된다.
이스라엘의 Rafael Advanced Defense Systems사는 무인 플랫폼에 적합한 경량의 컴팩 EW 모듈 개발을 위해 C-Pearl-DV 디지털 ESM과 디지털 Shark EA 시스템의 기술을 활용한다.
이 기술을 바탕으로 회사는 Protector USV 시스템의 EW 전용 변형 개발을 추구한다.

회사에 따르면 광대역 디지털 수신기와 발전된 다중 채널 DRFM 기반 기법 발생장치, 그리고 지향성 반도체 다중 빔 어레이 송신기를 포함한 모듈형 EW 페이로드는 높은 ERP를 제공한다고 한다.
GaN AESA 기반의 EA 하부 구성품은 동기 및 비동기 대응을 하며 교란과 유도 동작 모두를 지원할 수 있다고 한다.
또한, topmast와 통합 mast 지원을 위한 장착의 유연함을 가지고 있다고 한다.
Protector EW의 제어는 데이터링크를 통해 원격으로 수행되며 업링크를 통해 새로운 임무와 위협 라이브러리를 업데이트할 수 있고 상황 인지와 재밍 시나리오 현황을 다운 링크할 수 있다.
[영국, EWCM 계획]
영국 국방부와 해군은 현재 MEWP(Maritime Electronic Warfare Program) 하에서 해군의 대규모 EW 능력 재편을 수행하고 있다.
이 노력의 첫 단계는 MEWSIC(Maritime Electronic Warfare System Integrated Capability) Increment 1로 알려져 있으며 EW 계획과 실시간 조정을 위한 새로운 광대역 디지털 ESM 시스템과 EW 지휘 통제 (EWC2) 하부 시스템을 조달하는 것이다.
MEWP의 두 번째 단계는 EWCM(Electronic Warfare Countermeasures)로 알려져 있으며 훈련이 가능한 디코이 발사 시스템과 새로운 오프보드 대응책 시스템을 도입하는 것이다.
소모성 플랫폼과 무인 공중 시스템 그리고 전기적 페이로드 등을 포함한 잠재적인 해상 오프보드 능동형 디코이 기술들이 고려되고 있다.
영국 국방부의 Dstl(Defense Science and Technology Laboratory)는 EWCM을 지원하기 위한 광범위한 운용 분석을 수행했으며 미래의 회수 가능한 오프보드 시스템 개발을 위한 연구활동도 하였다.
개발된 한 가지 개념은 빠른 반응의 다중 로터 회전익 UAS 탑재체이며 콤팩트한 EW 페이로드를 탑재하고 20~30분 동안 비행할 수 있다.
Dstl이 연구한 다른 대체 개념은 EW 페이로드를 탑재한 완전 자동의 USV이다.
영국 Thales사는 오프보드 EW 페이로드를 USV에 탑재하고 시연을 완료하였다.
이 시연은 자체 투자로 수행되었으며 2019년 NATO NEMO(Naval Electro Magnetic Operation) 시험의 일환으로 수행되었다.

NEMO 19 이벤트 중 Thales사는 오프보드 능동형 RF 페이로드를 회사가 보유한 USV 시험 배인 Halcyon에 탑재하고 시연을 하였다.
이 능동형 RF 페이로드는 원래 2016년 2월에 끝난 프랑스/영국 ACCOLADE 기술 시연 프로그램으로 개발된 것이다.
비록 원래의 기동 하는 소모성 공중 탑재체 ACCOLADE 개념은 완전히 성숙되지 않았지만 Thales사의 Scorpion 해상 재머로부터 파생된 발전된 기법 발생기를 특징으로 하는 소형의 RF 페이로드를 포함하여 여러 기술은 그 위험성을 낮추었다.
Thales사에 따르면 NEMO19 시험을 통해 안정화 성능과 해면에서의 전파 효과 그리고 오프보드 EA 자산의 자동 제어를 위한 가능성을 시연할 수 있었다고 한다.
ACCOLADE 페이로드 자체에 이미 안정화 시스템이 포함되어 있지만 Thales사는 Halcyon의 후방 데크에 방위 위치/안정화 장치를 추가로 장착했으며 이것은 Halcyon의 자체 안정화 시스템과 순차적으로 통합되었다.
[프랑스, VESTA]
바다를 건너, 프랑스의 대응책/플레어 개발 회사인 Lacroix는 2020년에 UAV에서 능동형 오프보드 디코이 전개 가능성 입증을 위한 위험도 감소 및 연구 패키지를 발표했다.
VESTA(Véhicule Ejecté Support Tactique d’Autoprotection)로 알려진 이 프로젝트는 UAV 설계 전문 업체와 손잡고 반응형 소프트-킬 대함 미사일 방어 디코이의 가능성을 확립하기 위함이며 재머 페이로드를 전개하기 위해 멀티 로터 UAV를 사용한다.
Lacroix사에 따르면 VESTA 디코이는 하드-킬 대공 유도 미사일의 범위 안에서 운용되지만 일반적인 소프트-킬 기만 디코이보다 더 멀리 떨어져 운용되어 배 자체 보호의 추가적이고 보완적인 계층을 제공할 수 있다고 한다.
현재 프로그램은 발사 시스템과 다중 로터 탑재체의 성능에 집중하고 있으며 EW 페이로드 자체는 이 프로젝트의 범위 밖이다.
Lacroix의 개념은 로켓 부스트 모터가 VEST 탄을 밀어내는 데 사용된다.
일단 일정 거리로 전개되면 이 공중 탑재체는 6개의 로터 암을 펼치고 비행 제어 모드로 변환한다.
이 비행체 몸체의 앞부분에 탑재된 EW 페이로드는 적당한 재밍 기법을 송신하게 된다.
[결론]
대함 미사일 기술이 성숙되고 위협의 전술이 계속해서 진화함에 따라 배를 보호하기 위한 EW 디코이의 지속 시간의 중요성은 점점 더 명확해지고 있다.
수 십 년에 걸친 개념의 시연과 평가를 통해 이제는 새로운 세대의 디코이가 등장할 시기가 되었다.
출처 : The Journal of Electromagnetic Dominance 2021.12
'Electronic Warfare > EW News' 카테고리의 다른 글
| 레이다의 미래, AN/SPY-6 레이다 시스템 - 2022.02.09 (2) | 2022.02.26 |
|---|---|
| 전자전 분야에서의 AI 활용에 대한 어려운 문제 - 2022.01.06 (1) | 2022.02.25 |
| 레이저 무기는 Iron Dome 보다 효과적이지만 기존의 방공 시스템을 대체하지 못하는가? - 2022.02.04 (1) | 2022.02.13 |
| Rafael, F-15EX에 장착될 지 모르는 Sky-Shield EA Pod 시험 - 2022.02.03 (3) | 2022.02.09 |
| IAI/ELTA 해상 전자전 시스템 인터뷰 - 2022.01.23 (4) | 2022.01.31 |




댓글