[Semi-Active 유도]
반능동(Semi-Active) 유도는 미사일이 발사되고 난 후부터 명령 유도 방식과 상당히 다르다.
반능동 유도 방식의 첫 번째 요구사항은 표적 추적 레이다는 여전히 표적 추적을 유지해야 하며 추적 데이터는 화력제어 컴퓨터에 제공되어야 한다는 것이다.
이후 화력제어 컴퓨터는 표적 illumination 안테나를 표적을 지향하도록 하여 연속파(CW)로 표적을 비춘다. 미사일은 수동적으로 연속파 에너지에 반사된 신호를 추적한다.
(반능동 유도 미사일의 시커)
위협 시스템 중 연속파 신호를 추적하는 시스템을 적용한 미사일은 명령 유도 신호에 의해 유도되는 미사일과 상당히 다르다.
연속파 에너지를 추적하는 미사일은 안테나와 수신기로 구성된 시커(seeker) 파트가 장착된다.
이 시커 파트는 표적으로 향해 날아가기 위해 필요한 경로 수정을 계산하고 처리한다.
이는 아래의 그림과 같이 미사일 내부에 있는 안테나의 제로 보어사이트를 알기 때문에 가능하다.
표적에 반사된 연속파 에너지가 시커에 의해 수신되었을 때 일반적으로 제로 보어사이트 기준 위치와의 차이가 발생한다.
미사일 내부의 컴퓨터는 이러한 안테나 보어사이트와의 차이가 0이 되도록 미사일 자세를 제어하고 비행경로를 수정한다.
안테나 위치와 보어사이트 위치 간의 차이가 0이 되면 미사일은 직선적으로 표적을 향하고 있는 것이다.
반능동 유도 방식을 적용하는 미사일 시스템은 요격 중 일반적으로 속도 성분을 주요 표적 구분자로서 사용한다.
미사일 시커는 미사일이 발사 전 화력제어 컴퓨터에 의해 제공되는 기준 도플러 신호에 맞춰진다.
이 도플러 신호는 표적의 속도 성분 주변으로 추적 게이트를 설정하게 된다.
미사일이 발사된 후 표적의 도플러 신호와 기준 도플러 신호를 비교하기 시작한다.
(반능동 미사일의 mid-course 단계)
반능동 유도 미사일의 mid-course 단계 역시 명령 유도 미사일과 다르다.
반능동 유도 미사일은 mid-course 단계에서 표적에 반사된 연속파 에너지를 추적하며 비행하고 일반적으로 lead pursuit 프로파일로 비행을 한다.
그러나 만약 표적이 기동을 하면 미사일은 pure pursuit 비행경로로 전환할 수 있다.
Pure pursuit 비행은 표적을 향해 날아가는 것이며 lead pursuit 비행은 표적의 앞쪽을 향해 비행하는 것을 말한다.
명령 유도 방식의 미사일과 달리 반능동 유도 방식의 미사일은 미사일 비컨을 사용하지 않는다.
화력제어 컴퓨터에서 필요한 것은 연속파 illuminator로 표적을 비추는 것이기 때문에 경로 수정을 위해 미사일이 어디에 있는지 알 필요가 없다.
이것은 미사일이 발사되고 기준 도플러 신호가 설정될 때에 미사일은 추적과 유도를 시작할 수 있음을 의미한다.
이러한 반능동 유도 방식은 많은 지대공 미사일과 대부분의 레이다 유도 공대공 미사일의 주 유도 모드이기도 하다.
(반능동 미사일의 terminal 단계)
미사일이 표적 요격의 terminal 단계에 진입하면 연속파를 추적하는 미사일은 유도 모드를 변경하지 않는다.
미사일은 pure pursuit 비행 경로로 표적 요격의 terminal 단계를 완료하며 점화 기능을 할 수 있을 만큼 충분히 표적과 가까워질 때까지 계속 표적에 반사된 연속파 신호를 추적한다.
(반능동 유도 방식의 장점)
반능동 유도 방식의 미사일은 많은 장점이 있다.
(1) 거리 기만을 하는 재밍에 강하다.
(2) 미사일 발사 직후부터 유도가 가능하다.
미사일이 발사 레일을 떠나는 순간부터 기동이 가능하기 때문에 아주 작은 최소 거리를 갖는다.
(3) 필요시, 미사일은 자체적으로 경로 변경을 계산할 수 있다.
이는 명령 유도 방식의 미사일과 비교했을 때 표적의 기동에 더 빠르게 반응할 수 있게 한다.
(4) 장거리 요격의 경우에 명령 유도 방식의 미사일보다 더욱 정확하다.
이는 장거리 레이다의 추적 에러를 고려하지 않을 수 있기 때문에 가능하다.
즉, 표적 추적 레이다는 표적을 주시하고만 있으면 된다. (=연속파 안테나를 표적에 맞춰놓기만 하면 된다.)
(반능동 유도 방식의 단점)
비록 반능동 유도 방식은 일반적으로 우수한 유도 기술이라고 여겨지지만 몇 가지 단점을 가지고 있다.
(1) 반능동 유도 방식의 미사일은 발사전 미사일 컴퓨터에 기준 도플러 값이 입력되어야 한다.
이러한 기준이 없다면 반능동 유도 방식의 미사일은 발사될 수 없다.
(2) 반능동 유도 방식의 미사일은 표적의 도플러를 추적해야 한다.
표적의 도플러가 거의 0에 가까운 값이 되도록 만드는 채프나 빔 기동(notch 기동)은 미사일이나 레이다가 추적을 놓치게 만든다.
(3) 만약, 이러한 break lock이 발생하면 연속파를 추적하는 미사일은 표적을 다시 추적할 수 없으며 결국 요격에 실패할 수 있다.
[능동 유도(Active Guidance)]
능동 유도는 AIM-54 Phoenix나 AIM-120 AMRAAM과 같은 장거리 미사일이 적용하고 있는 개선된 방식이다.
이러한 특별한 유도 모드는 오직 terminal 단계에서 활성화되며 mid-course 단계에서는 주로 반능동 유도 또는 명령 유도 방식을 사용한다.
미사일이 “활성화” 단계에 들어가는 것은 요격 기하학적 구도에 따라 달라진다.
능동 유도는 표적에 대해 beam 또는 tail aspect 각도보다는 high aspect 각도가 될 때에 더 빠르게 활성화된다.
여기서 일반적으로 Aspect angle은 Lead 항공기의 6시 방향에서 측정한 wingman 항공기의 상대적인 위치로 정의하므로 표적 진행방향의 정면에서 접근할 때 high aspect 각도가 된다.
aspect 각도에 대한 정의는 다음의 그림을 참조한다.
능동 유도 방식의 미사일은 내부에 소형의 레이다 시스템을 탑재하고 있다.
미사일이 표적에 가까워짐에 따라 내부의 레이다 시스템이 켜지고 표적을 추적하게 된다.
미사일 내부의 화력제어 컴퓨터는 표적 요격을 위해 방향제어를 수행한다.
(능동 유도 방식 미사일의 장점)
능동 유도 방식의 미사일은 많은 장점을 가지고 있다.
(1) 능동 유도 방식 미사일은 장거리 표적에 대해 매우 정확한 정확도를 갖는다.
미사일 내부의 레이다가 활성화되면 더이상 표적 추적 레이다에 의존하지 않기 때문이다.
(2) 능동 유도의 미사일은 재밍하기가 어렵다.
미사일 내부의 레이다는 매우 좁은 빔폭을 운용하며 상대적인 출력은 표적과 가까워질수록 계속 증가하기 때문이다.
(3) 능동 유도 방식의 미사일은 fire-and-forget 무기이다.
명령 유도나 반능동 유도 방식의 미사일은 요격이 완료될 때까지 표적 추적 레이다가 필요하며 이는 미사일이 표적을 요격하기 전까지 추적 레이다의 위치가 예측 가능하게 되어 적으로부터의 공격에 취약하게 된다. 그러나 능동 유도 방식의 시스템은 미사일이 발사되고 내부 레이다가 “활성화” 되면 다른 시스템은 방어적인 수단을 취할 수 있다.
(능동 유도 방식 미사일의 단점)
능동 유도 방식의 미사일도 몇몇의 단점이 있다.
(1) 능동 유도 방식의 미사일은 명령과 능동 유도 모드 모두 통합되어 있는 복잡한 시스템이다.
(2) mid-course 단계에서는 여전히 전자 재밍에 취약할 수 있다.
mid-course 단계에서는 명령 유도나 반능동 유도 방식을 적용하고있기 때문이다.
(3) terminal 단계에서 미사일 내부의 표적 추적 레이다가 재밍을 받을 수 있으며 이는 미사일이 표적을 찾는 능력에 영향을 줄 수 있다.
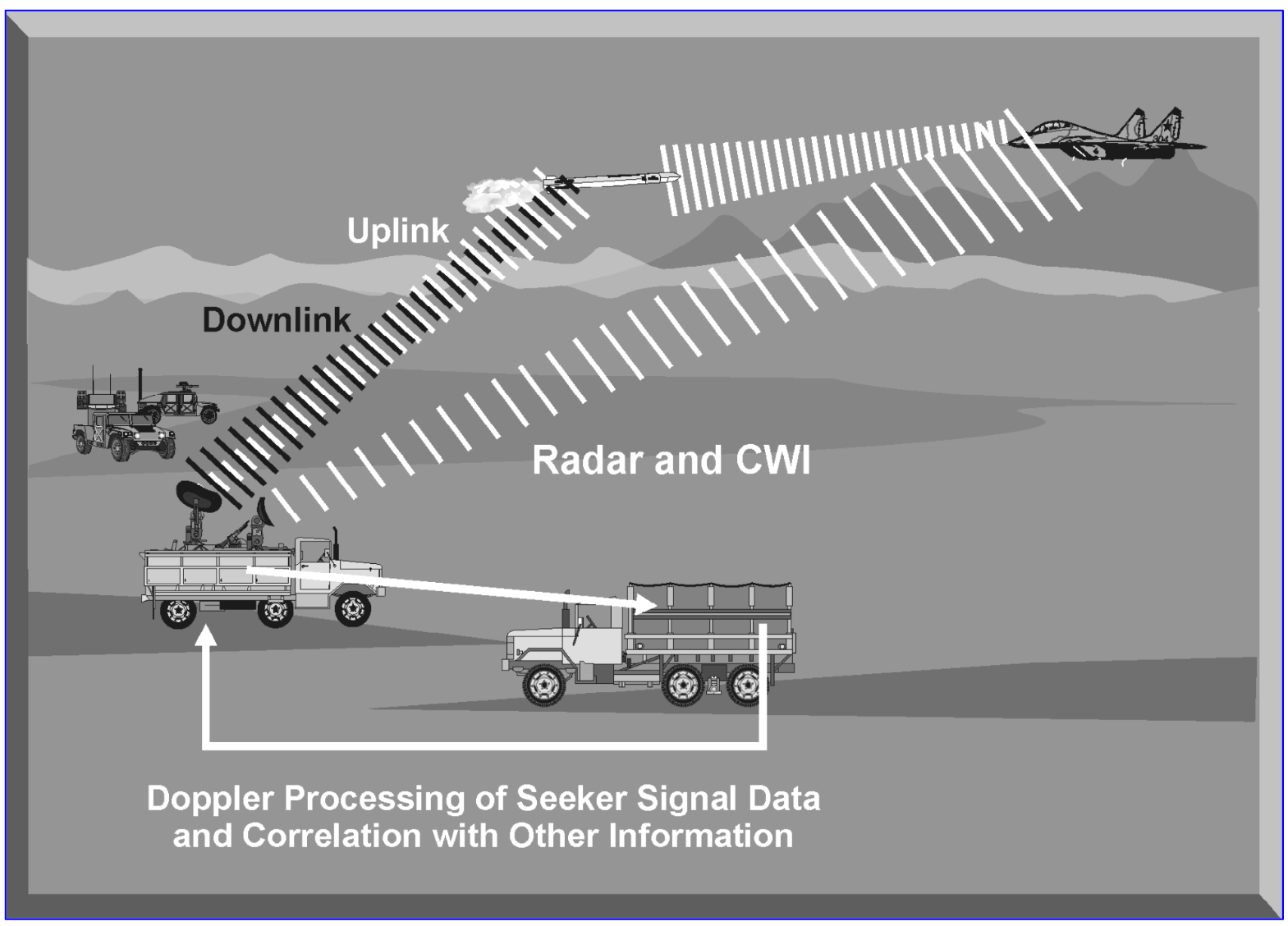
[시커 기반 지상 유도 / TVM 유도]
SAGG(Seeker-Aided Ground Guidance)와 TVM(Track-via-Missile) 유도에서 표적은 지상 기반의 레이다에 의해 조사되고 미사일은 표적으로부터 반사된 에너지를 수신한다.
기존의 반능동 유도 방식과 다른 점은 미사일은 자체적으로 유도 명령을 생성하지 않는다는 것이다.
대신에, 유도 명령을 업링크를 통해 받기위해 미사일은 원시의 교전 데이터를 지상의 화력제어 시스템에 송신한다.
TVM은 SAGG와 유사하지만 지상의 화력제어 시스템에 교전 데이터를 보내기 전에 추가적인 처리를 미사일 내에서 수행한다.
(SAGG와 TVM 유도 방식의 장점)
(1) 추적 레이다의 오차가 크게 발생하는 장거리 표적에 대해 매우 정확한 정확도를 갖는다.
(2) 미사일의 시커는 표적의 기동을 추적하여 새로운 위치를 TTR 화력제어 컴퓨터에 보내기 때문에 표적의 움직임에 매우 빠른 대응이 가능하다.
(3) TVM와 SAGG는 대부분의 데이터 처리가 TTR에 의해 수행되기 때문에 매우 크고 성능이 좋은 화력제어 컴퓨터를 사용할 수 있다.
(4) 위상 배열 레이다와 강력한 TTR 화력제어 컴퓨터를 통합할 수 있으므로 미사일은 다중의 표적과 교전할 수 있다.
예를 들면, Patriot 미사일 시스템은 최소 4개의 표적을 동시에 추적하고 교전할 수 있다.
(SAGG와 TVM 유도 방식의 단점)
TVM과 SAGG의 가장 큰 단점은 매우 복잡한 형태의 미사일 유도 방식이란 점이다.
이 시스템들은 레이다 추적 데이터와 미사일에서부터 수신한 데이터를 통합 처리하기 위해 복잡한 컴퓨터를 필요로 하며 고비용의 하드웨어와 유지보수 및 후속 지원이 필요하게 된다.
게다가 미사일 자체는 데이터 처리와 데이터 전송을 위한 하드웨어를 탑재할 수 있을만큼 커야 한다.
[대공포(AAA, Anti-Aircraft Artillery)]
AAA의 역할은 point 방어이다.
AAA 시스템은 고가치 자산에 대한 근접 방어를 제공하며 도시 방어, 비행장, 다리, 산업단지, 통신 및 지휘 통제 라인, 보병/탱크 부대, 그리고 SAM 사이트 등을 방어하기 위해 배치된다.
AAA 시스템은 견인식과 이동식 이렇게 두 가지 타입이 있다.
견인식 AAA는 고정된 지역에 배치되며 이동식 AAA 시스템은 대공 방어를 위해 배치되며 이동식 SAM 사이트를 보호한다.
견인식이나 이동식이나 모두 AAA 시스템의 유효성은 유도되지 않는 탄도 궤적을 갖는 탄을 발사해 항공기를 격추시키기 위해 항공기의 앞으로의 위치를 예측하는 시스템에 달려있다.
이를 위해 AAA 시스템은 표적 겨냥 발사와 영역/연발 발사 이렇게 두 가지 주요 전술을 적용한다.
(겨냥 발사 - Aimed Fire)
겨냥 발사를 위해서 AAA 시스템은 매우 정확한 항공기 위치 정보와 앞으로의 예측 정보를 필요로 한다.
이를 위해 AAA 시스템 총구에 장착된 광학 조준 시스템이나 화력제어 컴퓨터와 연동되는 레이다 시스템으로부터 정보를 받는다.
일반적으로 작은 구경의 AAA 기총은 광학 표적 획득 시스템에 의존하여 발사를 수행하며 빠른 속도의 발사와 단거리, 그리고 짧은 TOF(Time of Flight)는 표적 위치의 예측과 겨냥에 대한 문제들을 단순하게 만든다.
또한, 작은 구경의 AAA는 추적 탄약을 사용함으로써 사수는 광학적인 발사의 오차를 수정하는 데에 도움을 줄 수 있다.
더 큰 구경의 AAA 시스템은 발사 속도가 느리고 장거리이며 긴 TOF를 갖으며 겨냥 발사의 문제들을 해결하기 위해서 TTR과 화력제어 컴퓨터를 적용한다.
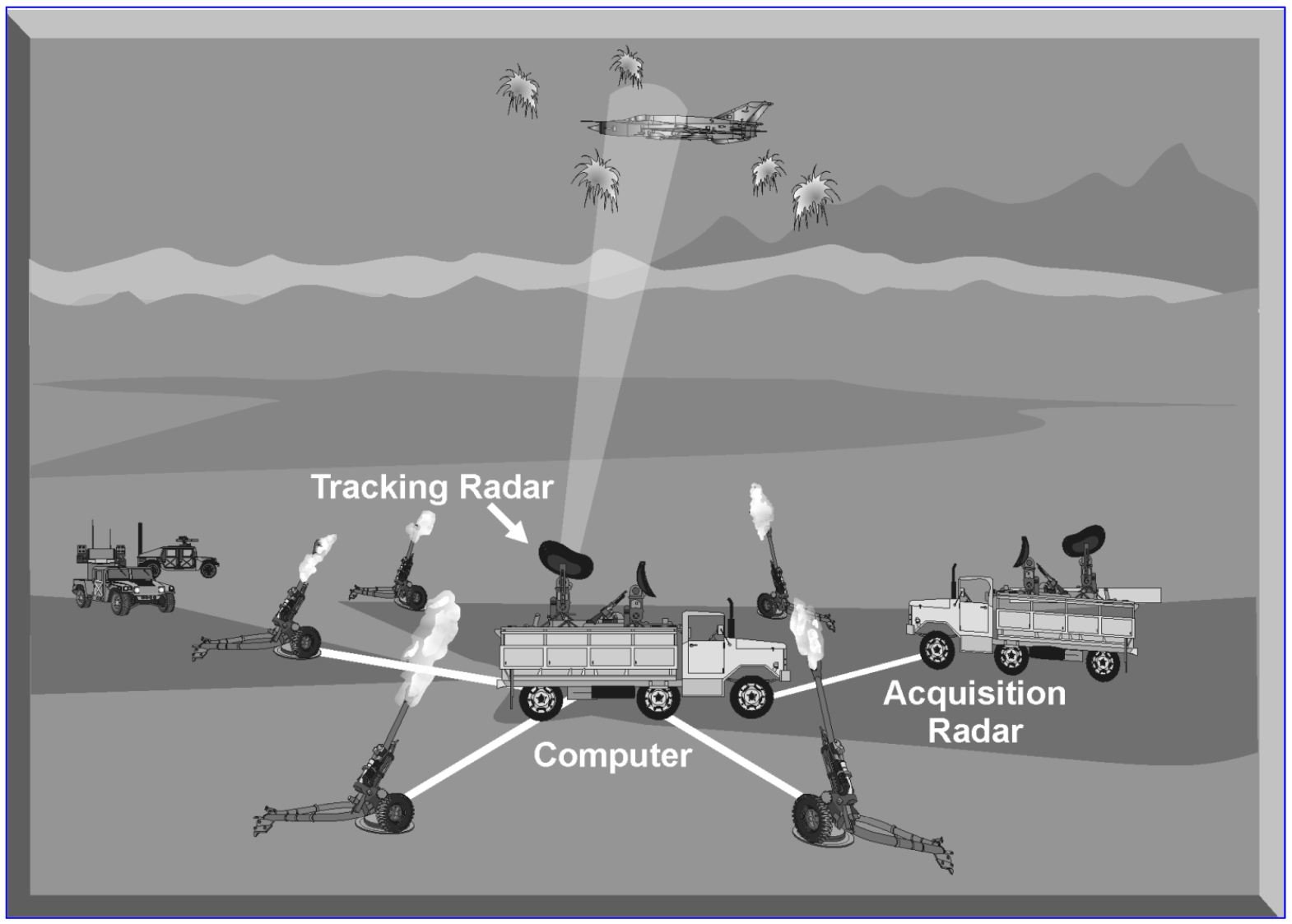
광학 표적 추적을 적용한 전형적인 겨냥 AAA 교전의 절차는 먼저 획득 레이다로부터 발사 방향에 대한 초기 정보로부터 시작한다.
이러한 발사 방향은 개별 기총에 대체적인 겨냥 명령을 제공하며 이후 사수는 시각적으로 표적을 찾고 장착된 조준경을 사용하여 표적의 선행 각도를 예측하여 발사를 시작한다.
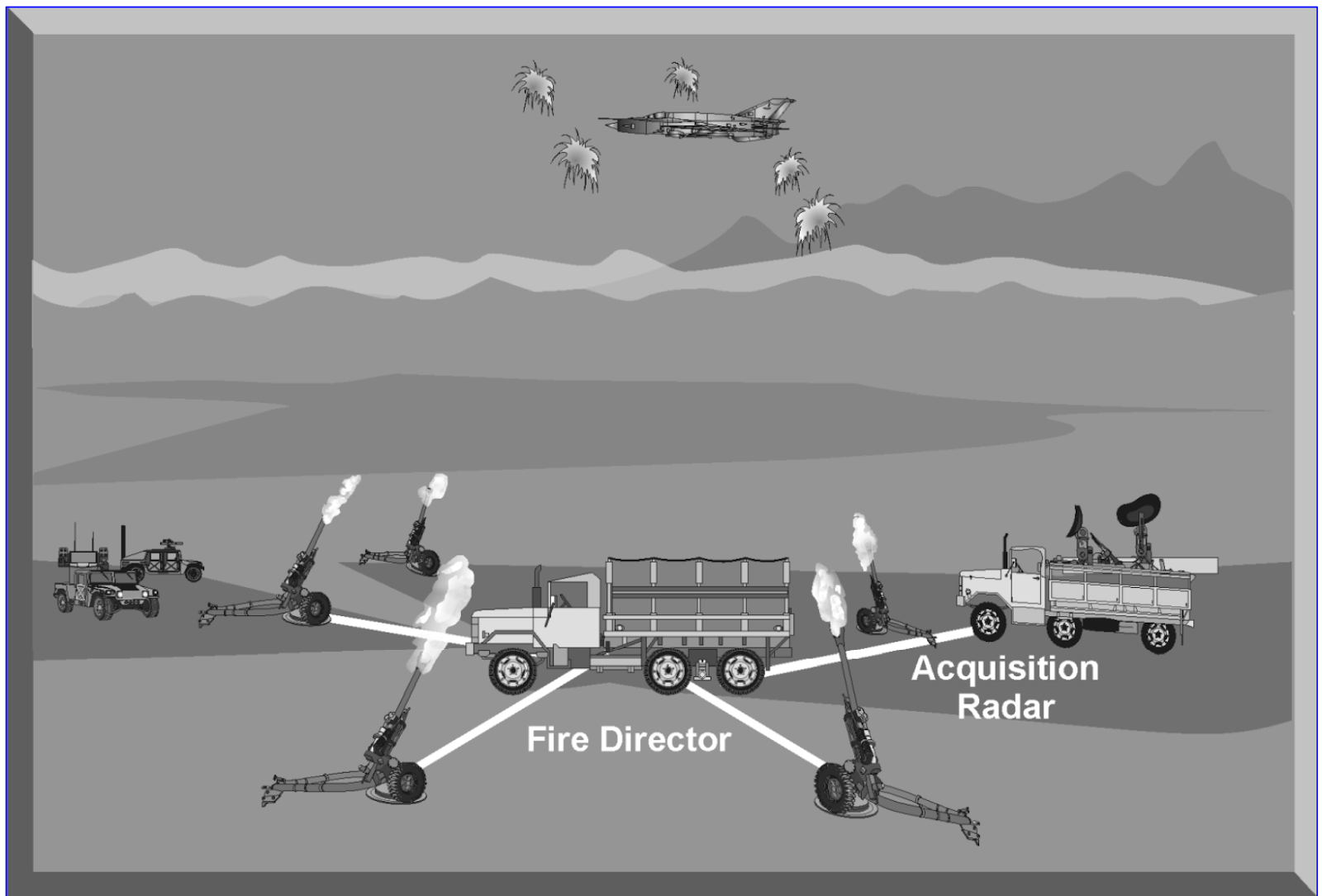
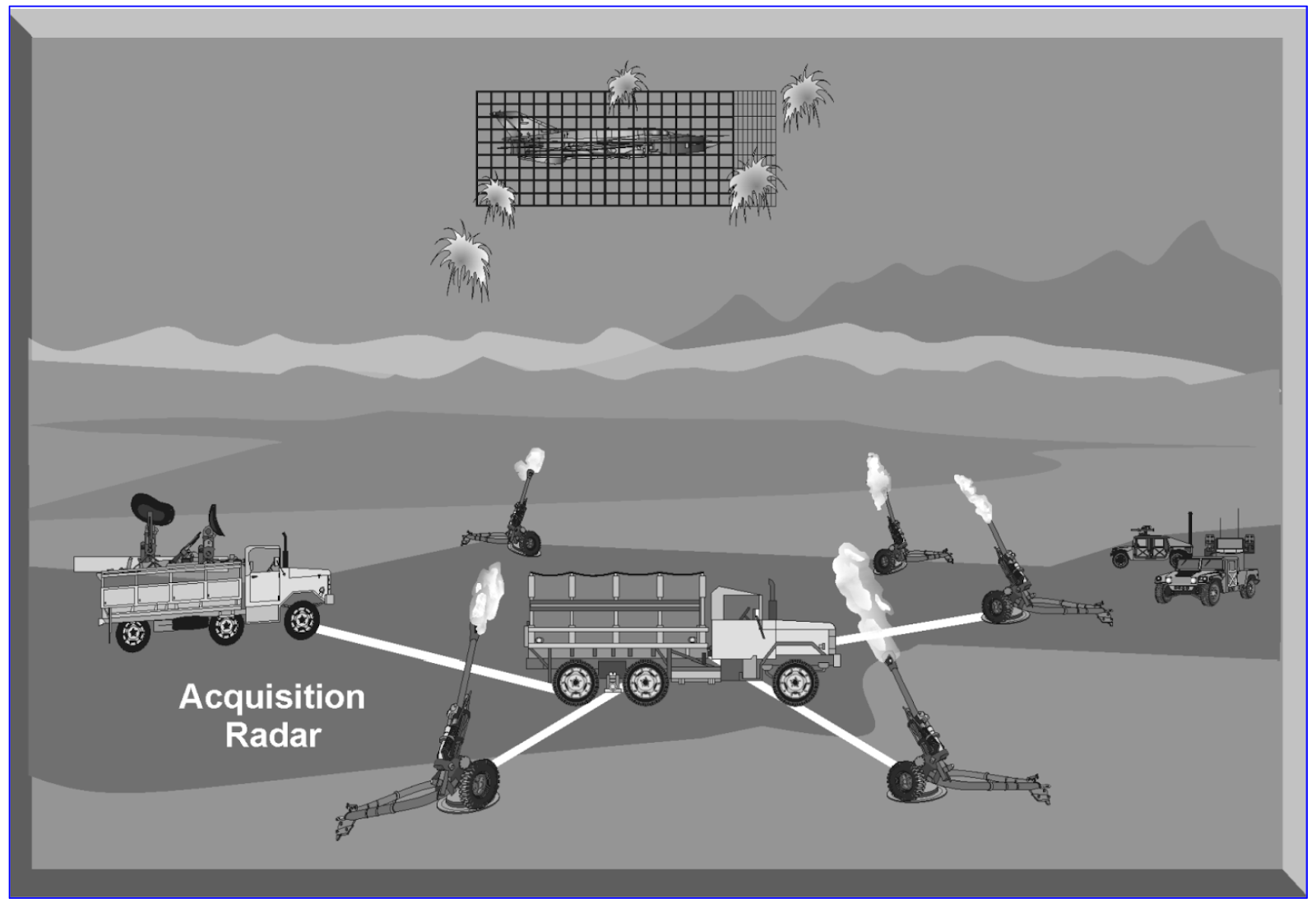
(영역/연속 발사 - sector/barrage fire)
영역 또는 연속 발사 전술은 항공기를 정확하게 추적하지 못할 때 사용한다.
회득한 정보는 항공기가 일정 영공이나 특정 영역을 비행할 것이라는 정보를 제공한다.
AAA의 연속 발사를 통해 비행기를 격추하거나 AAA 발사의 화망 안에 항공기가 들어오도록 하기 위해 발사 지휘관은 사수에게 이 영역을 랜덤 하게 발사하도록 지시한다.
이러한 전술은 point 방어나 고정 표적에 대해 효과적이다.
영역/연속 발사는 예상되는 방향과 고도를 지향하여 공격한다.
여기까지 2부에 걸쳐서 대표적인 미사일 유도 방식과 AAA 시스템에 대해 알아봤다.
이러한 위협 시스템의 유도 방식을 이해함으로써 여기에 대응하는 재밍 기법이나 채프/플레어 운용, 전술적 기동등을 설계할 수 있다.
이제까지 레이다 시스템과 위협 시스템에 대해 알아봤으며 다음 챕터부터는 레이다 재밍, 디코이등 위협에 대응하는 원리와 시스템에 대해 알아보겠다.
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| [CHAPTER 9. INTRODUCTION TO RADAR JAMMING] - 2부 (3) | 2022.06.06 |
|---|---|
| [CHAPTER 9. INTRODUCTION TO RADAR JAMMING] - 1부 (1) | 2022.06.01 |
| [CHAPTER 8. RADAR MISSILE GUIDANCE TECHNIQUES] - 1부 (3) | 2022.04.18 |
| [CHAPTER 7. TARGET TRACKING] - 2부 (4) | 2022.03.18 |
| [CHAPTER 7. TARGET TRACKING] - 1부 (3) | 2022.03.02 |




댓글