표적 추적 레이다(TTR, Target Tracking Radar)는 항공기를 격추시키기 위해서 미사일이나 기총을 유도할 때에 필수적인 정보를 제공할 수 있도록 설계된 레이다 시스템이다.
탐색 전용의 레이다나 또는 표적 획득 모드를 통해 표적이 탐지되면 TTR은 정확한 표적의 거리, 방위, 고도 또는 속도 정보를 화력 제어 컴퓨터에 제공한다.
(1) 일반적인 TTR은 표적의 거리와 방위, 고도 또는 속도를 추적하기 위해서 별도의 추적 루프를 가지고 있다.
TTR의 안테나는 단일 표적에 맞춰져 있으며 레이다는 표적의 획득과 추적을 시작한다.
TTR은 연속적인 표적 데이터를 측정하기 위해 일반적으로 자동 추적기를 적용한다.
거리 추적 루프는 자동 거리 추적을 유지하기 위해서 early gate와 late gate 거리 추적기를 사용한다.
방위와 고도 추적 루프는 안테나로 하여금 일정한 표적 반사를 유지하기 위해서 오류 신호를 생성한다.
속도 추적 루프는 펄스 도플러 레이다와 CW 레이다에서 볼 수 있으며 클러터를 제거하고 정확한 표적 각속도 정보를 생성한다.
이러한 모든 중요 정보는 무기 작동을 위한 화력 제어 컴퓨터로 전달된다.
(2) 화력 제어 컴퓨터(Fire Control Computer)는 무기를 활용할 수 있는 중요 정보와 함께 프로그램된다.
미사일의 경우 화력 제어 컴퓨터는 미사일의 공기역학과 거리에 대한 프로그램이 되어 있으며 대공포(AAA, Anti Aircraft Artillery)의 경우는 총탄의 탄도, 발사 속도, 그리고 추적 속도 등이 화력 제어 컴퓨터에 프로그램된다.
화력 제어 컴퓨터는 발사 솔루션을 계산하기 위해서 TTR로부터의 정확한 표적 정보와 프로그램된 무기의 파라미터를 사용한다.
발사 솔루션이 계산되면 화력 제어 컴퓨터는 무기를 자동으로 발사하거나 운용자에게 경고를 주게 된다.
미사일의 경우에 화력 제어 컴퓨터는 미사일 폭파나 또는 능동 미사일 유도 모드가 시작되기 전까지 미사일 유도와 기폭 명령을 연속적으로 제공할 수 있다.
대공포의 경우에서는 화력 제어 컴퓨터는 필요한 선행 각도와 기총의 조준, 그리고 발사 시작을 계산한다.
(3) 필요한 방위와 고도 해상도를 획득하기 위해서 대부분의 TTR은 높은 주파수를 사용하며 정확한 표적 추적을 위해 좁은 빔폭을 제공한다.
높은 운용 주파수는 또한 레이다가 넓은 밴드폭을 송신하게 한다.
필요한 거리 해상도를 얻기 위해서 대부분의 TTR은 좁은 펄스폭과 높은 펄스 반복 주파수를 적용하여 표적 정보를 빠르게 업데이트한다.
[거리 추적(Range Tracking)]
대부분의 TTR 응용에 있어서 표적은 거리와 방위, 그리고 고도가 연속적으로 추적된다.
거리 추적은 운용자가 A 스코프에 전시되는 정보를 보면서 수동으로 핸드휠 스위치를 이동하여 마커를 원하는 표적의 반사 신호에 위치시킴으로써 수행할 수 있다.
이 핸드휠 스위치의 값은 표적 거리를 측정한 것으로서 화력 제어 컴퓨터에서 사용할 수 있는 전압값으로 변환된다.
표적의 속도와 기동이 증가하면 운용자가 수동으로 표적 거리 추적을 하는 것이 힘들어진다.
그렇기 때문에 대부분의 TTR은 자동 거리 추적 루프를 적용하고 있다.
원뿔 스캔이나 TWS, 모노 펄스, 그리고 펄스 도플러 레이다를 포함한 모든 펄스 TTR은 스플릿 게이트(Split Gate) 또는 leading-edge 자동 거리 추적 시스템을 가지고 있다.
TTR의 자동 거리 추적은 두 가지의 필수적인 기능을 제공한다.
(1) 표적 거리 값
(2) 간섭이나 다른 반사 신호를 배제한 표적 허용 거리 게이트
레이다 탐지 거리는 일반적으로 자동 표적 추적을 시작하기 위해 표적 구분을 위한 한 첫 번째 값이며 두 번째 기능은 다른 추적 루프의 정상적인 동작을 위해 필수적이다.
(거리 게이트 회로)
거리 게이트 회로는 간단하게 설명하면 펄스가 송신된 이후에 일정 기간 동안을 열어두는 전기적인 스위치이다.
이 스위치가 동작하는 시간은 특정 거리에 해당된다.
이 거리 게이트 내에서 나타나는 반사 신호는 자동으로 추적된다.
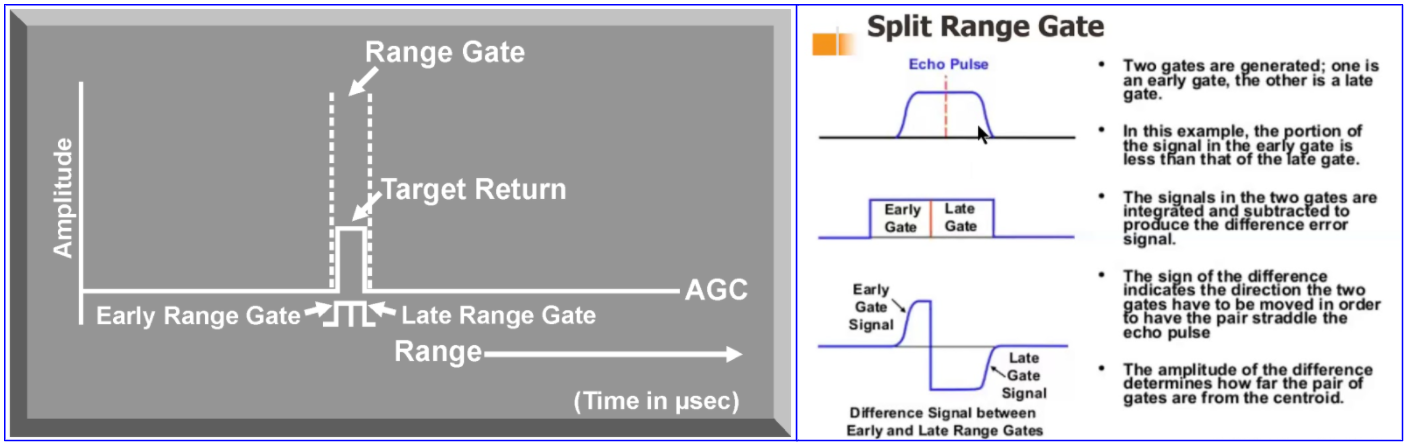
가장 대표적인 자동 거리 추적은 split-gate 추적기에 의해 수행된다.
다음의 그림처럼 두 개의 거리 게이트가 생성되며 자동 거리 추적 루프는 early-gate와 late-gate가 표적 반사 신호로부터 동일한 양의 에너지를 유지할 수 있도록 동작한다.
거리 추적 오류는 early-gate의 출력 신호에서 late-gate의 출력 신호를 빼어 계산한다.
이 거리 추적 오류 신호의 양은 펄스의 중심과 거리 게이트의 중심 간의 차가 된다.
이 오류 신호의 부호는 표적을 계속적으로 추적하기 위해 게이트가 위치해야 할 방향을 나타낸다.
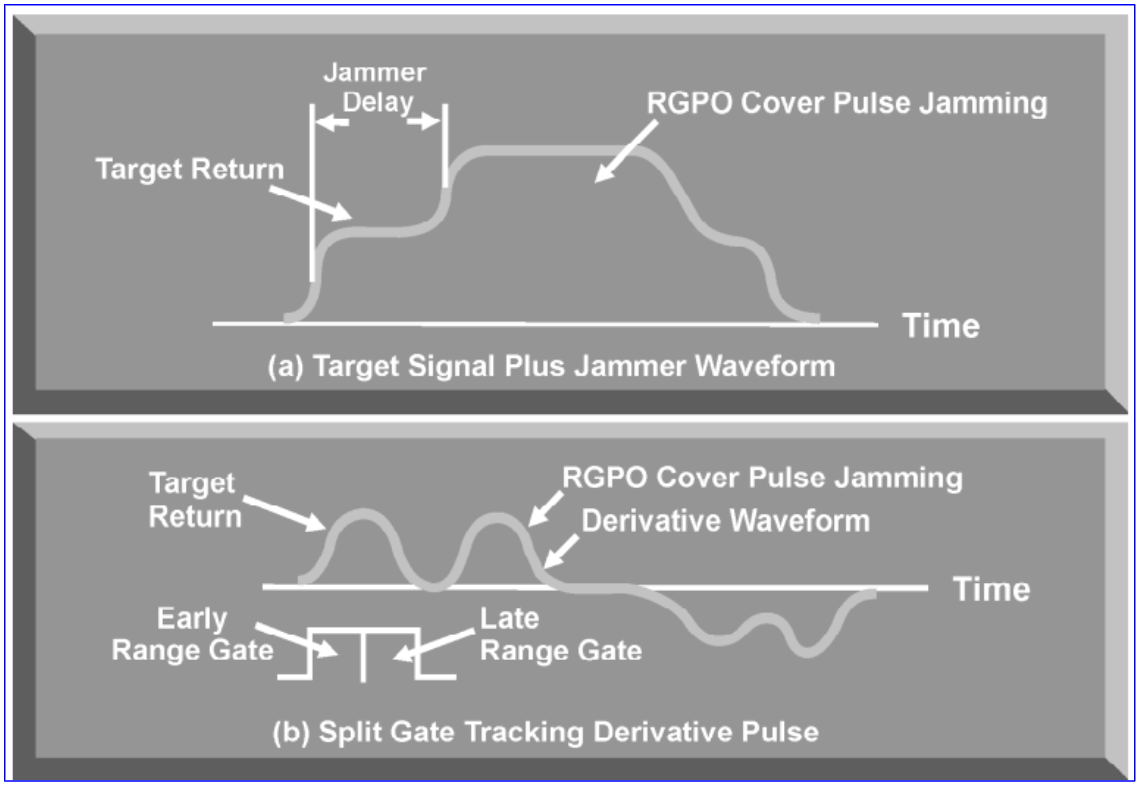
(Leading-Edge 거리 추적기)
Leading-edge 거리 추적기는 RGPO(Range-Gate Pull Off) 재밍에 대항하기 위한 전자 보호 기법이다.
아래의 그림은 leading-edge 추적의 활용에 대해 설명하고 있다.
Leading-edge 추적기는 표적 반사 신호의 leading edge로부터 모든 거리 정보를 가져온다.
모든 RGPO 커버 펄스 재밍은 어느 정도 시간의 증가로 표적 반사 신호를 끄는 경향이 있다.
시간의 측면에서 전체 반사 신호를 구분하면 표적 반사 신호는 재밍 펄스로부터 구분된다.
Split-gate 추적기를 전기적으로 반사 신호의 시작 부분이나 leading edge에 위치시킴으로써 거리 추적 루프는 표적 반사 신호를 계속 추적할 수 있고 재밍 신호는 무시할 수 있다.
이 후 거리 추적 루프는 split-gate 추적 로직을 사용하여 거리 추적 오류의 크기와 방향을 결정하여 거리 게이트를 재위치 시킨다.
(추적 게이트 폭)
추적 게이트의 폭은 레이다 설계에 있어서 중요한 고려사항 중 하나이다.
거리 게이트는 다른 반사 신호로부터 표적 신호를 효과적으로 구분하기 위해 그 폭이 충분히 좁아야 한다. 또 한편으로는 표적 반사 신호의 에너지를 충분히 받을 수 있을 만큼 넓어야 한다.
거리 추적 게이트의 폭은 일반적으로 레이다의 펄스폭과 동일하다.
(자동 이득 조절(AGC, Automatic Gain Control)
거의 모든 거리 추적 게이트는 여러 형태의 자동 이득 조절(AGC)을 사용한다.
AGC는 표적 클러터나 glint를 제한하고 또한, 과도한 오경보를 피할 수 있도록 설계된다.
[원뿔형 스캔(Conical Scan)]
원뿔형 스캔 추적 시스템은 연속적인 로빙(sequential lobing)의 특별한 한 형태이다.
이 연속적인 로빙은 레이다 안테나 빔이 표적 주변으로 빔 위치를 연속적으로 움직이는 것을 의미하며 이를 통해 각도 오류 데이터를 추출한다.
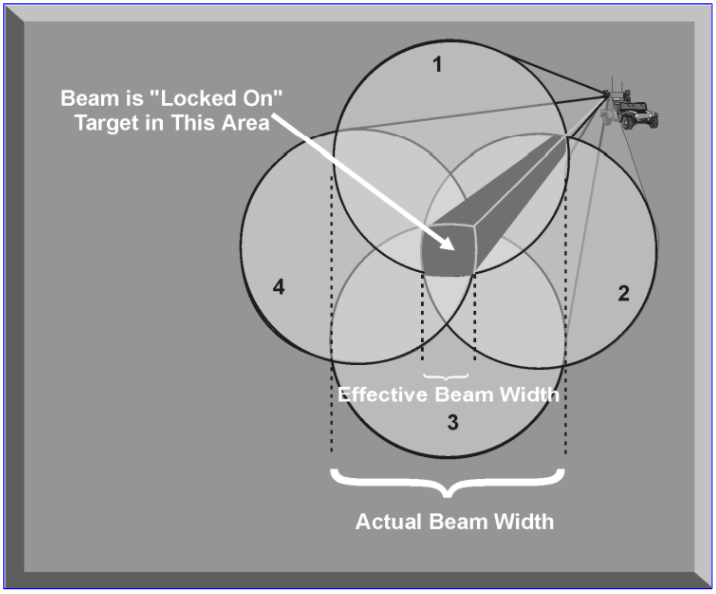
원뿔형 스캔 레이다가 방위 및 고도 추적 데이터를 생성하기 위해서 빔은 최소 4개의 위치 간을 움직여야 한다.
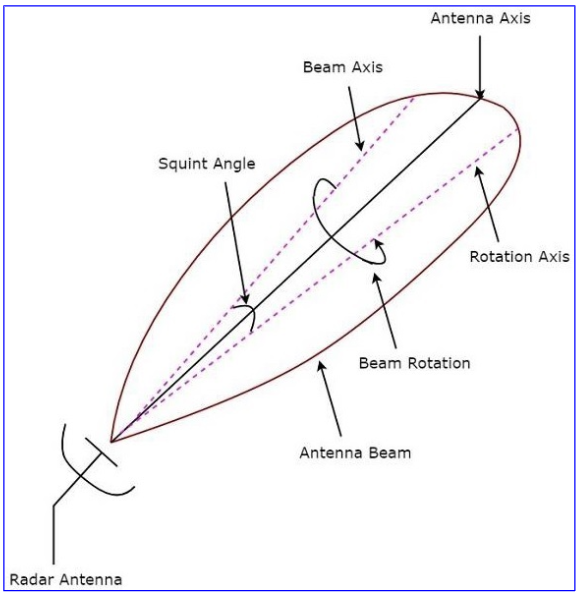
가장 단순한 원뿔형 스캔 안테나 중 하나는 후방 피드를 갖는 파라볼라 안테나이며 신호의 편파를 유지하면서 회전한다.
레이다 빔은 고정된 주파수를 가지고 표적 주변을 회전한다.
회전축과 안테나 빔 축 간에 이루는 각을 squint 각도라고 한다.
원뿔형 스캔 레이다는 처음에 거리에서 항공기 표적을 추적한다.
방위와 고도 추적을 위해서 표적 반사 신호는 레이다 빔의 회전 주파수와 같은 주파수에서 변조된다.
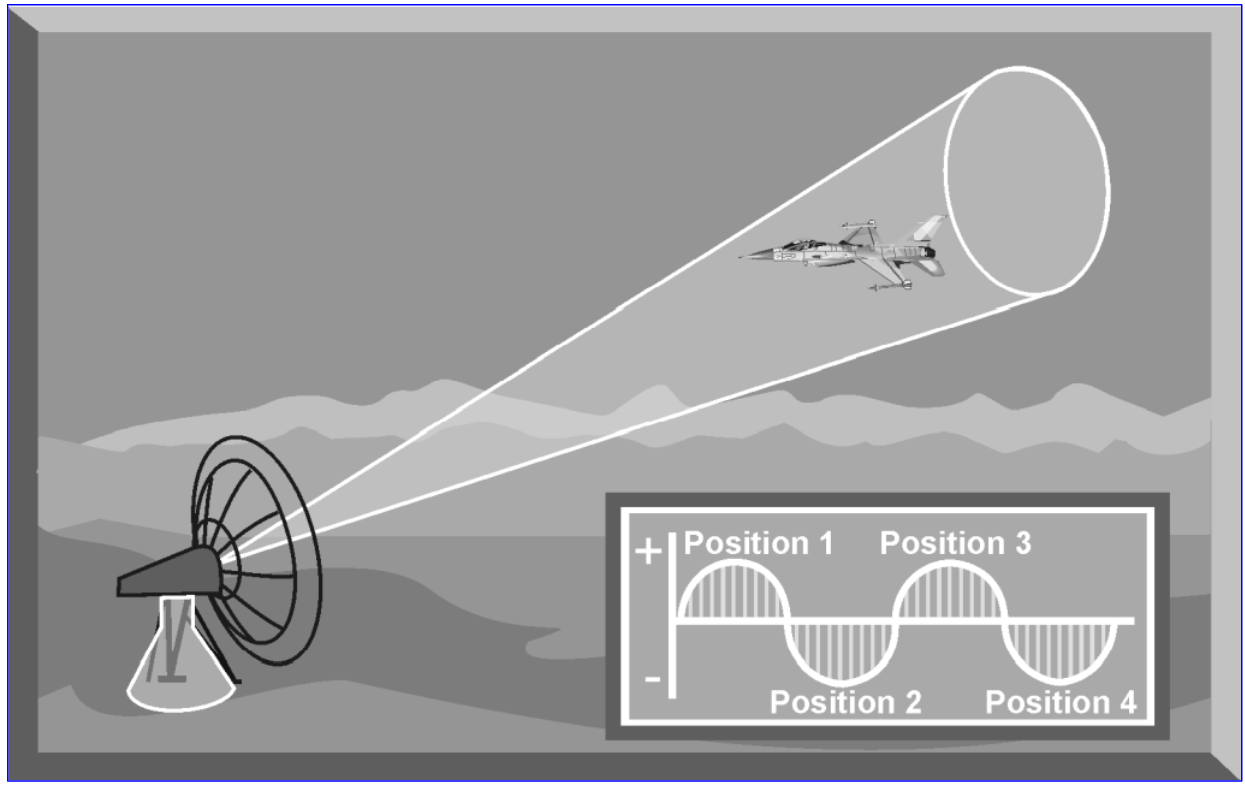
그 결과 표적 신호 출력은 사인파와 닮은 형태가 된다.
방위과 고도 추적 루프는 각 4곳의 위치에서 동등한 에너지 값을 유지하기 위해 서보 모터를 구동하여 안테나 위치를 잡는다.
변조된 신호의 양은 표적이 안테나 보어사이트로부터 얼마큼 떨어져 있는지를 나타내 주며 변조의 위상(+ 또는 -)은 방향을 결정한다.
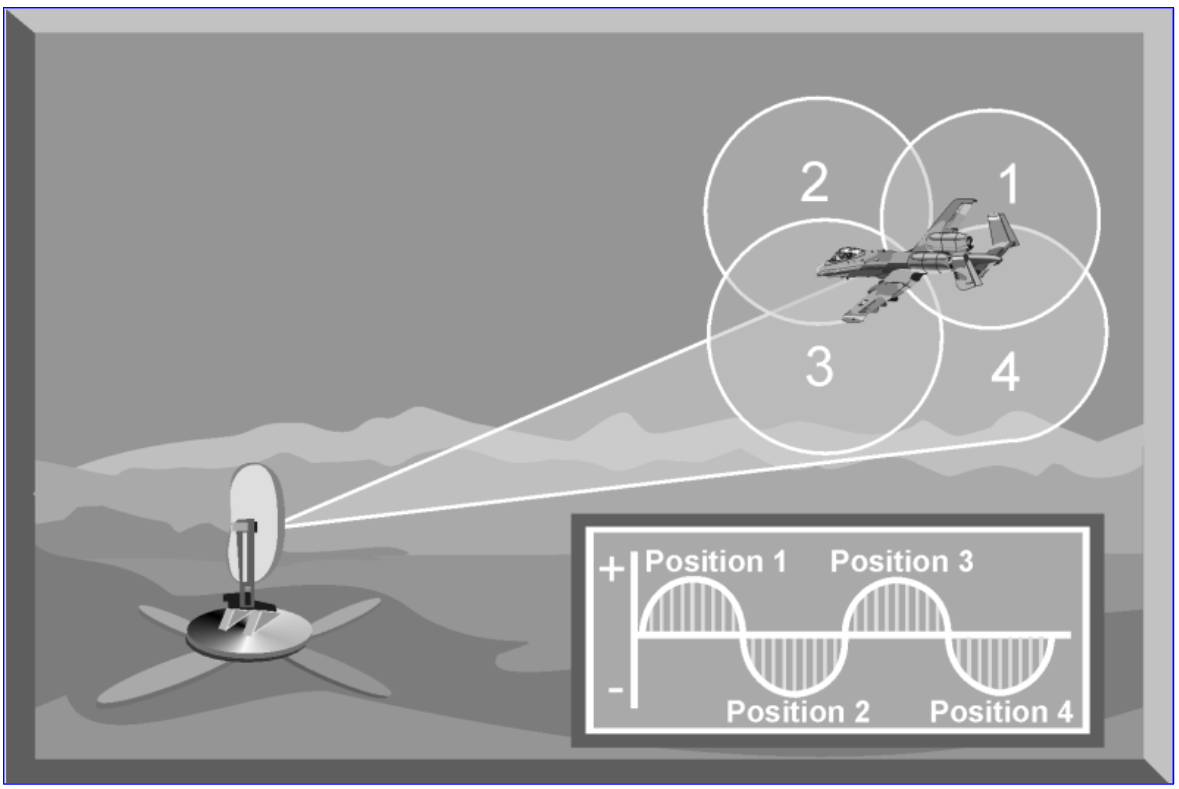
아래의 그림에서 대부분의 표적 에너지는 1 위치에 있으며 4 위치에서의 에너지는 작다.
고도 추적 루프의 출력은 양의 값이고 따라서 안테나 위치를 위쪽으로 제어한다.
방위 추적 루프의 출력은 안테나를 오른쪽으로 이동시킨다.
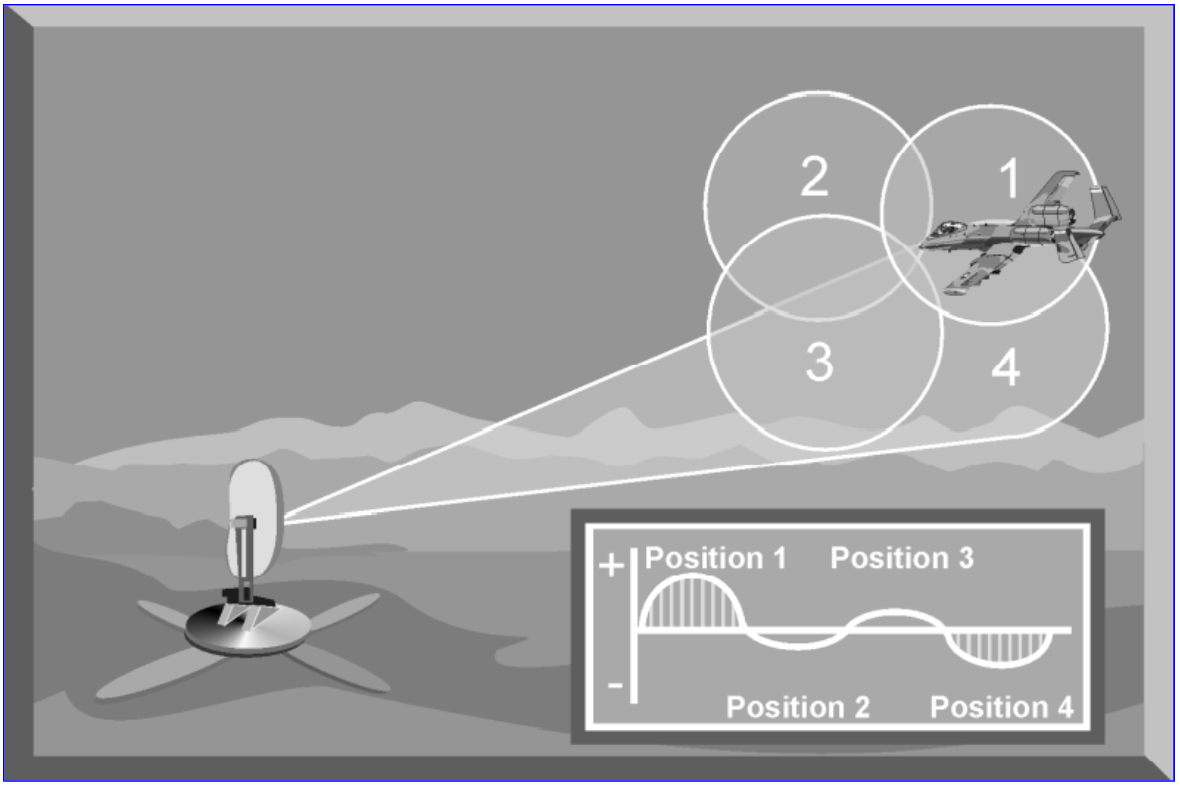
각 스캔의 위치에서 표적 에너지의 균형이 맞으면 표적은 추적 영역의 중심에 위치한 것이다.
방위와 고도 추적 회로는 이 에너지 균형을 유지하여 레이다 빔이 표적에 맞춰질 수 있도록 안테나 서보 모터를 계속해서 제어한다.
(원뿔형 스캔의 장점 및 단점)
원뿔형 스캔 레이다의 주요 장점은 작은 빔폭을 통한 정확한 표적 추적 정보 획득이 가능하다는 것이다.
원뿔형 스캔 레이다의 주요 단점은 다음과 같다.
(1) 좁은 빔폭으로 인해 표적 획득에 문제가 있다.
그러므로 Palmer-helical 스캔을 사용하더라도 표적 추적을 시작하는 데에는 일정한 시간이 거릴 수 있다.
(2) 원뿔형 스캔 레이다는 스캐닝하는 빔 회전 주파수를 기반으로한 inverse gain 변조 재밍에 취약하다.
(3) 원뿔형 스캔 레이다는 추적 솔루션을 생성하기 위해 많은 레이다 반사 펄스를 분석해야 한다.
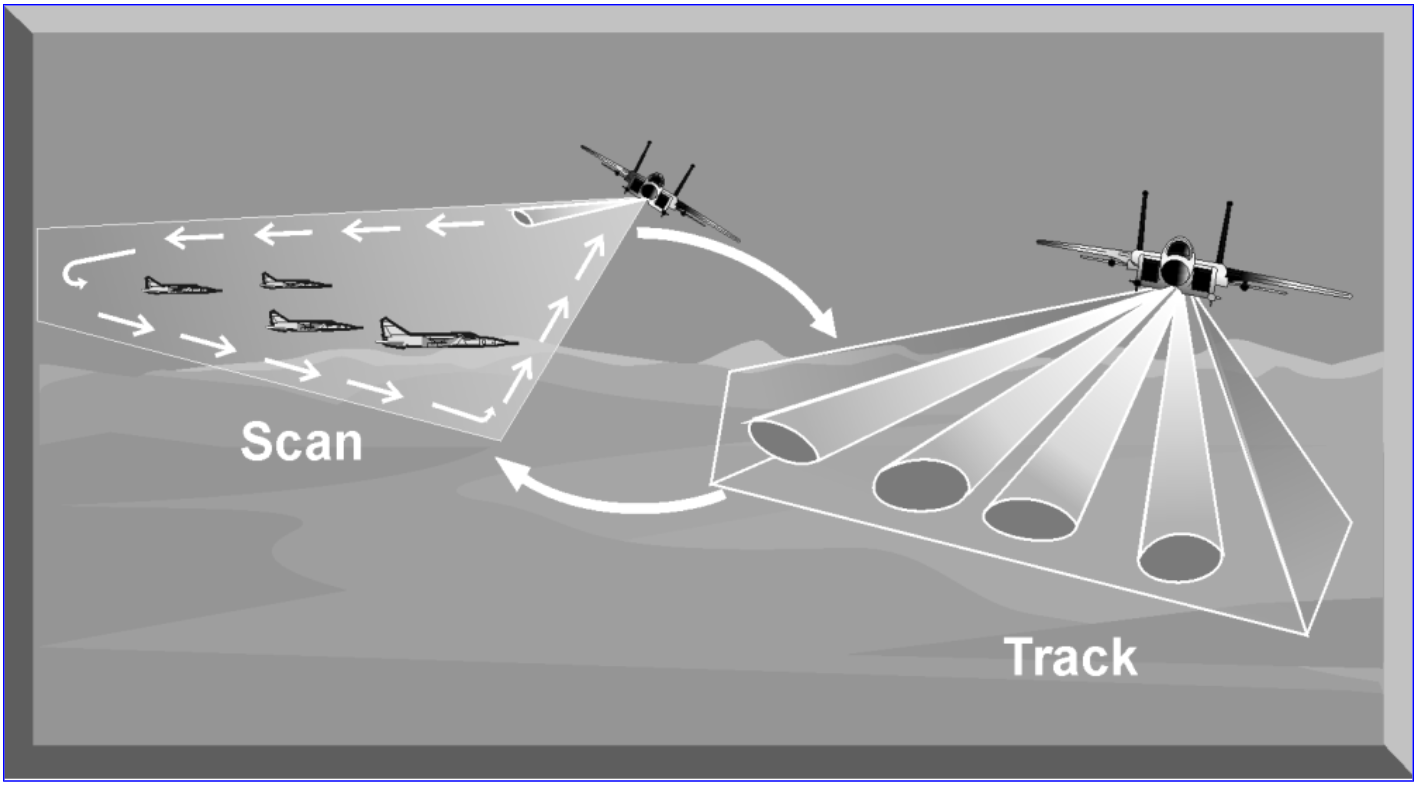
[스캔 중 추적 (TWS, Track-While- Scan)]
TWS는 전용의 추적기로 표적을 연속적으로 추적하는 것 대신에 탐지와 추적 모드를 결합한 모드이다.
탐지 영역 내에서 움직이는 다중의 표적들에 대한 추적이 가능하다.
WS 운용을 하는 레이다는 두 종류의 타입이 있다.
(재래식 TWS (Conventional TWS))
재래식의 TWS 위협 레이다는 두 개의 별도 안테나를 통해 두 개의 별도 빔을 생성한다.
이 빔들은 서로 다른 두 개의 주파수와 영역에서 운용되고 공간에서는 같은 지역에 오버랩된다.
이 오버랩 영역은 단일 표적을 위한 추적 영역이 된다.
한 빔은 거리와 고도 정보를 위해 수직면으로 할당되고 다른 빔은 거리와 방위 정보를 위해 수평면에 할당된다.
각 빔은 각 영역을 초당 5~50번 스캔하며 이를 통해 표적의 거리와 방위, 고도가 빠르게 업데이트된다.
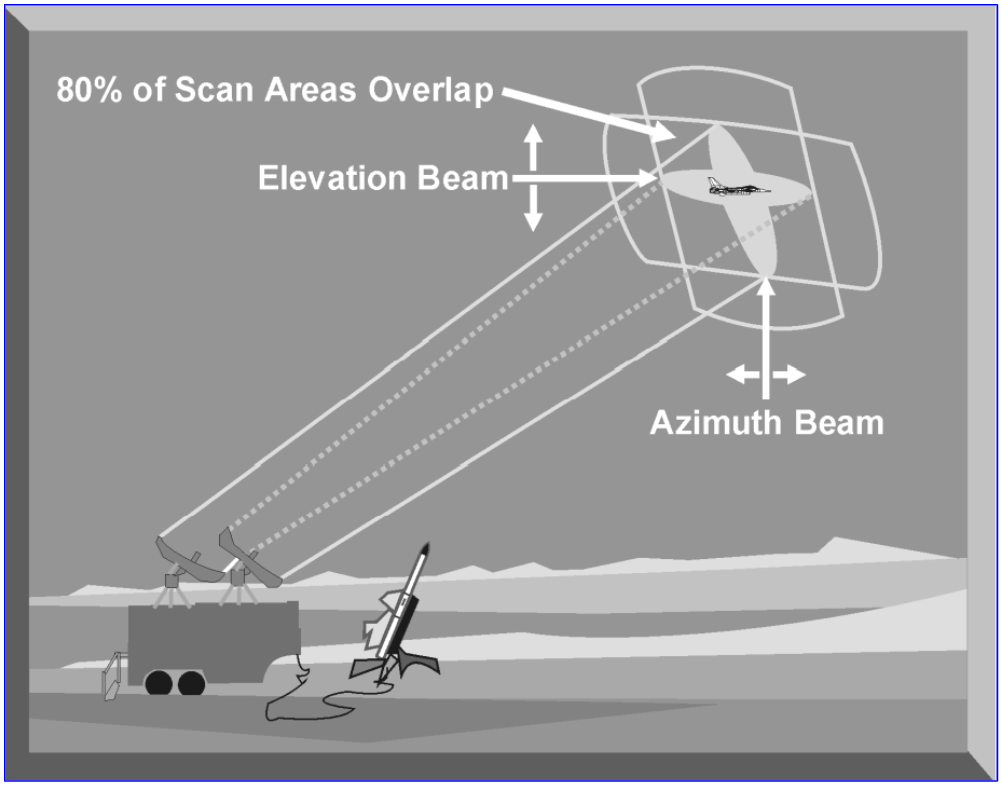
두 개의 TWS 안테나는 전자 기계식으로 빔을 생성한다.
각 안테나 출력은 각각의 디스플레이에 입력되고 레이다 탐지 영역 내의 모든 표적에 대한 거리와 각도 정보를 제공한다.
고도 빔으로부터의 디스플레이는 거리와 고도 정보가 나타나고 방위 빔으로부터의 디스플레이에는 거리와 방위 정보가 나타난다.
운용자는 주 파라미터인 거리 정보를 기반으로 이 디스플레이들이 보여주는 반사 신호 정보에 커서를 위치시킨다.
표적이 교전을 위해 지정되면 레이다는 자동으로 표적의 중심에 레이다 빔을 위치시키면서 추적을 유지하려고 작동된다.
운용자에게 표적이 지정되면 거리 게이트는 활성화되고 스플릿-게이트 추적기를 이용하여 표적을 추적한다.
방위와 고도 추적 루프는 거리 게이트 내의 표적으로부터 정보를 받는다.
빔이 표적을 스캔하면 빔 패턴에 따라 신호 세기 포락선을 갖는 반사 펄스들을 수신한다. 방위 빔 패턴은 아래의 그림과 같다.
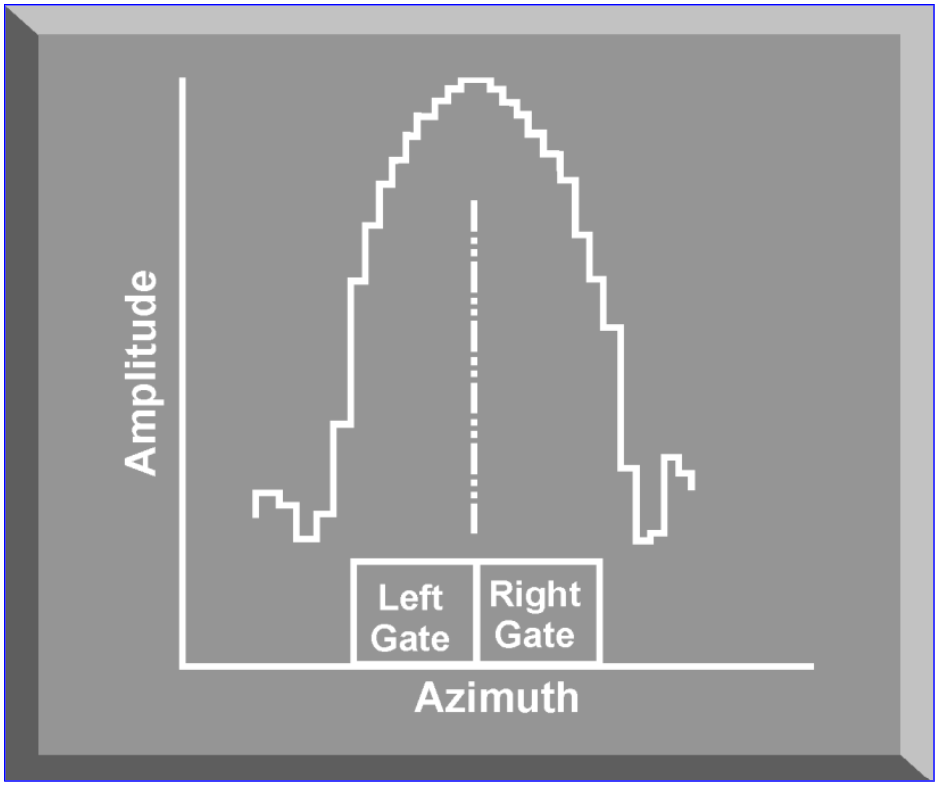
방위 추적기는 일반적으로 스플릿-게이트 추적기이며 거리 추적기의 것과 동일한 개념이다.
그러나 거리 지연 시간은 방위 스캔 시간으로 대체된다.
방위 추적기는 왼쪽 게이트와 오른쪽 게이트를 사용한다.
각 게이트는 표적 반사 신호의 몫을 통합하여 전압-시간 값을 생성한다.
방위 게이트가 표적 중심에 있으면 영역은 동일하며 오류 신호(오른쪽 게이트에서 왼쪽 게이트를 뺀 값)는 0이 된다.
방위 추적 루프는 스캔 영역에 있는 표적의 중심에 빔을 유지할 수 있도록 안테나의 서보 모터에 신호를 보낸다.
고도 추적은 업 게이트와 다운 게이트를 사용하면 개념은 앞에서와 동일하다.
고도 추적 루프 역시 스캔 영역에 있는 표적의 중심에 빔을 유지할 수 있도록 안테나의 서보 모터에 신호를 보낸다.
표적이 지정되고 레이다가 자동으로 추적 영역의 중심에서 레이다 반사 신호가 유지되면 표적의 거리와 방위, 고도 정보는 화력 제어 컴퓨터에 보내진다.
레이다는 계속해서 스캔 영역에 있는 다른 레이다 정보를 제공한다.
화력 제어 컴퓨터는 지정된 표적에 대한 요격 솔루션을 지정하고 미사일이 발사된다.
레이다는 표적과 미사일을 추적하면서 미사일 격추의 순간에 대한 미사일 수정 정보를 비행 중인 미사일에 보낸다.
이러한 수정 정보는 표적과 미사일에 대한 거리, 방위, 고도 정보를 바탕으로 한다.
정보는 레이다의 전용 안테나를 통해 미사일의 별도 안테나에 전달된다.
레이다로부터 미사일로 전달되는 커멘드를 업링크 유도 커멘드(uplink guidance commands)라 부르며 반대로 미사일로부터 레이다와 화력 제어 컴퓨터로 보내지는 것을 다운링크(downlink) 정보라고 부른다.
TWS 레이다의 장점은 다음과 같다.
(1) TWS 레이다는 스캔 영역에 있는 모든 표적에 대한 탐지 정보를 가지면서 하나의 표적에 대해서는 추적을 유지할 수 있다.
(2) 빠른 스캔 속도는 표적 파라미터의 빠른 업데이트를 제공한다.
재래식 TWS 레이다의 단점은 다음과 같다.
(1) 넓은 방위와 고도 빔으로 인한 넓은 해상도 셀(=해상도가 떨어짐)
(2) 각 독립적인 빔의 스캔 속도를 기반으로 한 변조 재밍에 취약하다.
(평판 또는 위상 배열 안테나의 TWS (Planar or Phased Array Antenna TWS)
평판 또는 위상 배열 안테나 시스템을 적용하고 있는 현대의 많은 레이다는 TWS 모드를 가지고 있다.
레이다는 사실 추적과 스캔을 동시에 할 수 없다.
그러나 빠르게 탐지와 추적을 번갈아가면서 수행할 수 있다.
공대공 레이다 시스템은 대부분 공통적으로 평판 배열 안테나를 사용한다.
스캔 모드에서 레이다 안테나는 펜슬 빔을 생성하고 레스터 스캔을 사용하여 탐지 영역에서의 표적을 탐지한다.
탐지된 표적은 항공기의 디스플레이를 통해 조종사에게 보여진다.
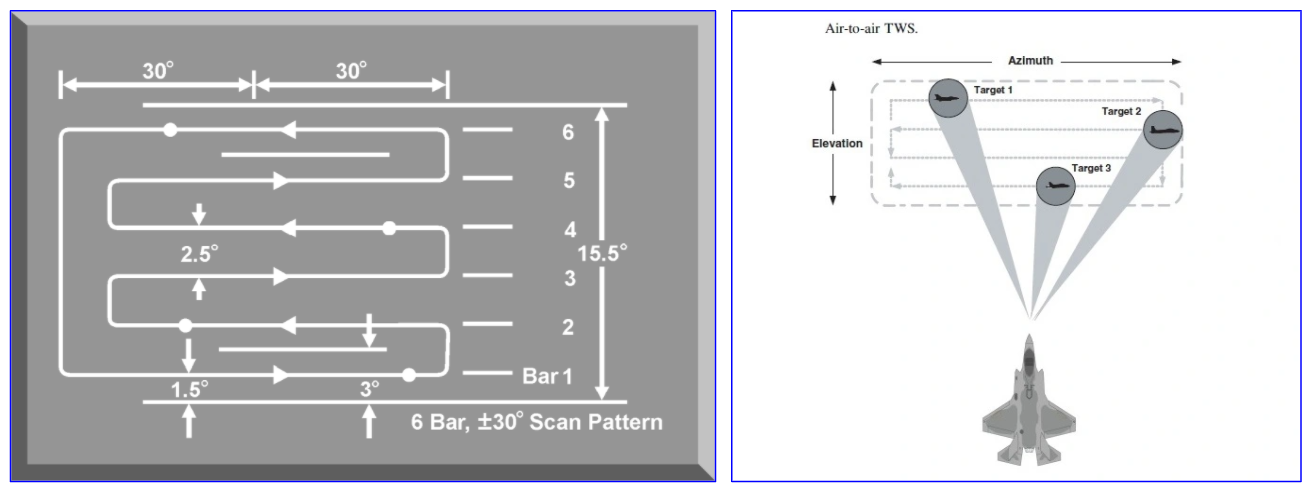
추적 모드에서 안테나는 다중의 빔을 생성하여 각 표적을 비춘다.
레이다는 일반적으로 모노펄스 또는 펄스 도플러 기법을 사용하여 표적의 거리와 방위, 고도 또는 속도 정보를 업데이트한다.
여기에 대해서는 뒤쪽에 설명하겠다.
레이다는 각 탐지 표적에 대해서 현재의 데이터와 예측된 앞으로의 표적 위치 데이터를 포함하고 있는 추적 파일을 만들기 시작한다.
레이다가 추적과 스캔 모드를 스위칭할 때에 표적 파라미터는 추적 루프 내에서 업데이트된다.
새로운 표적 정보는 측정 데이터 처리 셀에 있는 예측 정보와 비교를 수행한다.
만약 두 데이터 세트가 특정 제한값 내에 있다면 표적 위치와 정보는 업데이트된다.
이러한 프로세싱을 게이팅(gating)이라 부른다.
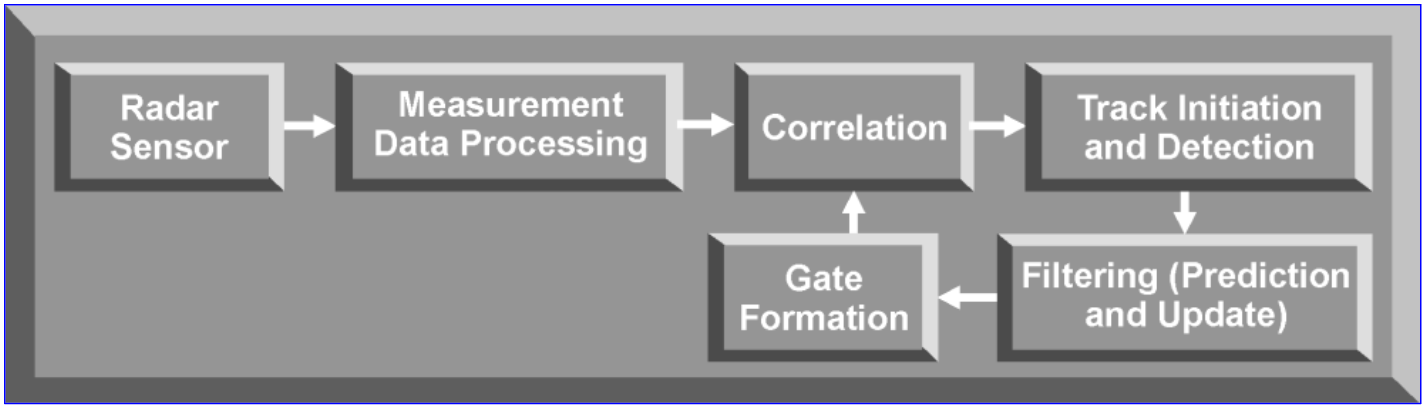
만약 업데이트된 표적 정보가 예측된 값과 일치하지 않는다면 이 정보는 상관 프로세서로(Correlation Processor) 보내진다.
상관 프로세서는 표적 데이터의 추가적인 개선을 기반으로 이 불일치를 해결하려고 시도한다.
만약 상관 프로세서가 기존의 추적 파일에서 이 표적의 파라미터를 할당하지 못하면 즉, 신규 탐지된 파라미터가 기존의 추적 파일 정보와 일치성을 찾지 못하면 새로운 추적 파일이 생성되고 디스플레이에 시현된다.
평판/위상 배열 TWS 레이다의 대표적인 장점은 넓은 영역을 탐지하면서 각각의 표적을 추적할 수 있다는 것이다.
추적할 수 있는 표적의 수는 레이다가 생성할 수 있는 빔의 수와 관련되어 있다.
평판/위상 배열 레이다는 펄스 레이다 시스템과 비교하여 최대 파워와 평균 파워를 증가시킬 수 있다.
평판/위상 배열 레이다의 빔은 전기적으로 제어되고 빠르게 빔과 스캔을 바꿀 수 있기 때문에 많은 재밍 기법에 강한 특성을 갖는다.
평판/위상 배열 TWS 레이다의 주요 단점은 비용적인 부분과 복잡성, 그리고 컴퓨터 프로세싱에 성능이 의존적이라는 것이다.
[LORO (Lobe-On-Receive-Only)]
LORO는 TWS 레이다의 전자 보호(EP, Electronic Protection) 기능으로서 개발된 모드이다.
LORO는 표적을 수동적으로 추적할 수 있는 기능이 있는 레이다에서 적용할 수 있는 모드이기도 하다.
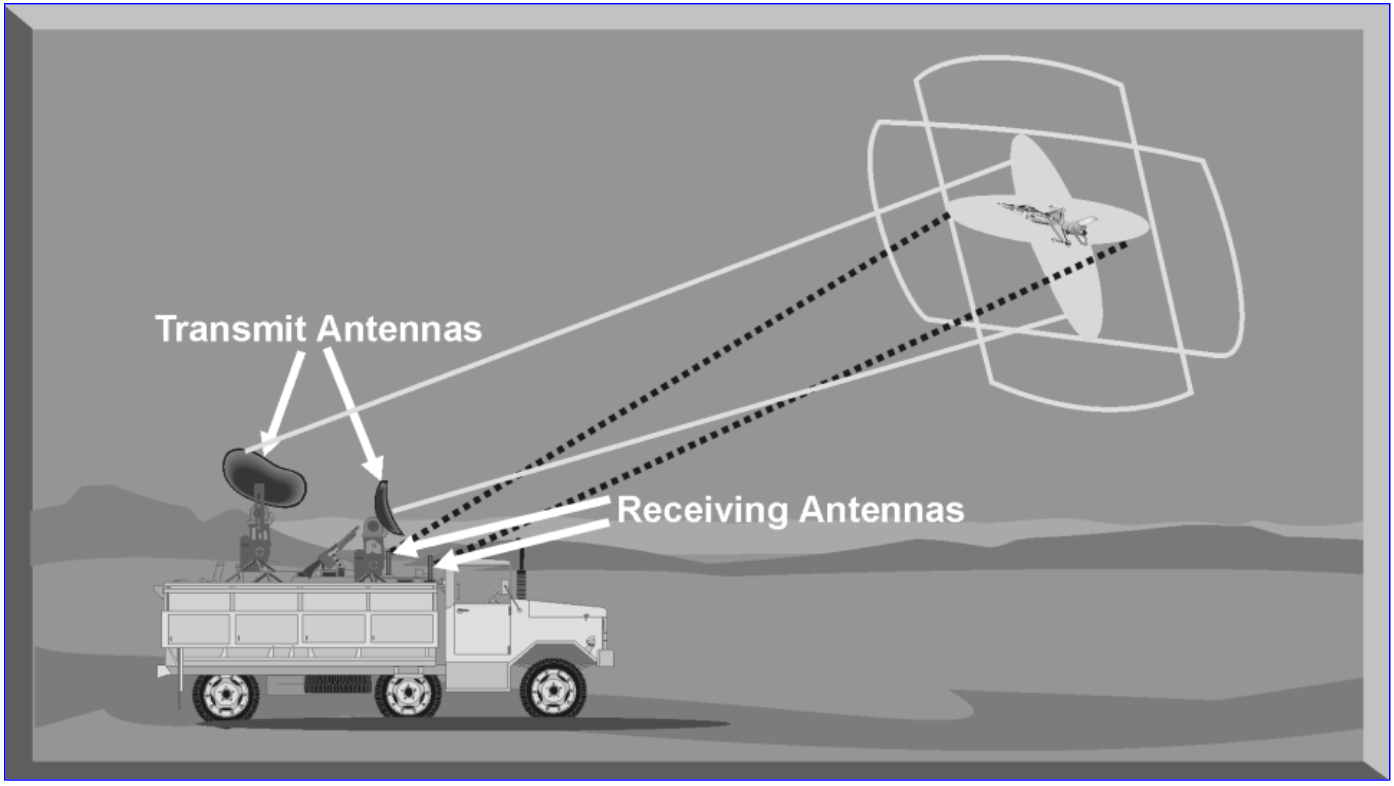
LORO 모드에서 레이다는 연속적으로 신호를 조사(illuminating)하는 안테나 세트를 통해 송출한다.
그리고 연속 송출된 신호가 표적에 부딪혀 돌아온 신호는 다른 수신 안테나 세트를 통해 수신한다.
수신 안테나는 수동형이며 전기적으로 반사된 신호를 스캐닝함으로써 방위와 고도 추적 신호를 생성한다.
이 추적 신호는 송신 안테나가 표적을 지시하고 수신 안테나의 추적 영역 중심에 위치하도록 안테나 서보 제어로 보내진다.
거리 추적 회로는 안테나 조사 신호의 송신과 수신 간의 시간 차를 이용한다.
스필릿-게이트는 거리 추적을 위해 적용된다.
(LORO 모드의 장점)
빔을 조사하는 안테나는 LORO 모드에서는 매우 좁은 빔폭과 높은 송신 전력을 사용한다.
이렇게 함으로써 LORO 모드를 사용하는 레이다에 대한 잡음 재밍의 효과를 줄일 수 있다.
게다가 조사 안테나로부터 연속되는 신호의 송출은 TWS 레이다를 기만하기 위한 각도 기만 재밍에 대한 효과를 줄일 수 있다.
이러한 특별한 재밍 기법은 TWS 안테나의 스캔 속도를 이용한다.
그러나 LORO 모드에서 조사 안테나는 스캔 속도를 갖고 있지 않다.
이렇듯 잡음 재밍과 기만 재밍 기법에 영향성이 적다는 것이 LORO 모드의 가장 큰 장점이다.
LORO 모드는 또한 잡음 재밍 기법을 역이용한 TOJ(Track-On-Jam) 기능을 갖는다.
TOJ 모드에서, 수신 안테나는 수동적으로 탐지된 잡음 재밍 신호를 추적할 수 있다.
레이다는 가장 강한 재밍 신호를 표적으로 가정한다.
수신 안테나는 가장 강한 재밍 신호를 마치 표적에 부딪혀 반사된 신호인 것처럼 처리한다.
수신 안테나는 재밍 신호를 추적 영역의 중심에 위치시키기 위해 방위와 고도 추적 신호를 생성한다.
TOJ 모드에서 표적의 거리 정보는 제공하지 않는다.
[모노 펄스 레이다]
모노펄스 레이다의 추적 기능에 대한 설명은 "Chapter 4. Radar System Components"에서 상세히 설명하였으므로 여기서는 넘어가도록 하겠다.
[CHAPTER 4. RADAR SYSTEM COMPONENTS]
레이다 시스템의 각 구성 요소는 특정 레이다의 기능을 결정하기도 하고 한계를 결정하기도 한다. 또한 이러한 레이다 구성 요소의 특징을 통해 특정 레이다 시스템에 대한 효과적인 대응책을
superhky.tistory.com
다음 2부에서는 CW 레이다와 펄스 도플러 레이다에 대해 알아보겠다.
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| [CHAPTER 8. RADAR MISSILE GUIDANCE TECHNIQUES] - 1부 (3) | 2022.04.18 |
|---|---|
| [CHAPTER 7. TARGET TRACKING] - 2부 (4) | 2022.03.18 |
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS] - 2부 (1) | 2022.02.03 |
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS]-1부 (4) | 2022.01.16 |
| [CHAPTER 5. RADAR PRINCIPLES] (5) | 2021.12.26 |




댓글