[연속파 레이다(Continuous Wave Radar)]
CW(Continuous Wave) 레이다는 레이다 시스템의 초기 형태 중 하나이다.
펄스 레이다 시스템과는 다르게 CW 레이다는 반사 신호를 탐지하기 위해서 RF 송신 중 끊김이 없이 연속적으로 RF 에너지를 내보낸다.
이러한 연속적인 레이다 송신을 위해 기존의 CW 레이다는 두 개의 안테나를 가지고 있었는데 하나는 송신용 하나는 수신용이다.
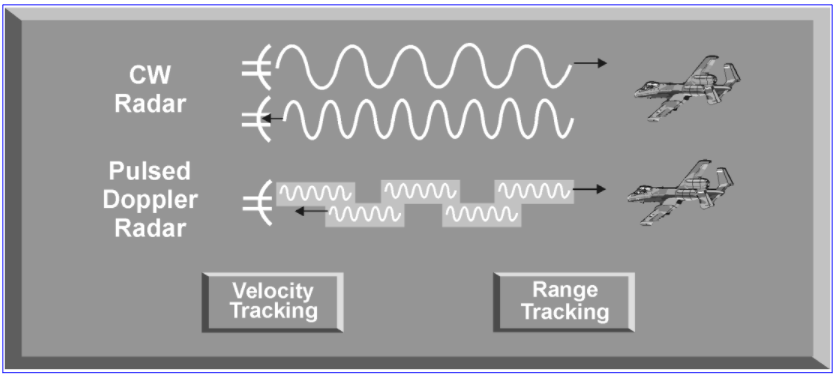
(CW 도플러 레이다)
연속적인 송신으로 인해 반사 신호도 연속적으로 생성되며 따라서 반사 신호의 특정 부분이 송신 시의 어느 특정 부분이었는지 확인이 불가하다.
이로 인해 일반적인 거리 탐지가 불가하다.
한편 표적의 방위와 고각 정보는 RF가 표적에 반사될 때의 안테나 위치를 기반으로 한다.
도플러 원리의 간단한 응용을 통해서 CW 레이다는 표적을 속도 측면에서 추적이 가능하고 클러터를 제거할 수 있다.
송신 신호의 주파수와 수신 신호의 주파수간의 차이를 이용하여 CW 레이다는 주파수 변화를 기반으로 한 표적 구분이 가능하다.
이러한 형태의 레이다를 CW 도플러 레이다라고 부른다.
(FM CW 레이다)
단순한 CW 도플러 레이다의 가장 큰 단점은 표적에 대한 거리 정보를 제공하지 못한다는 것이다.
CW 레이다가 표적 거리 정보를 획득하는 한 가지의 방법은 주파수 변조(RM, Frequency Modulation)를 사용하는 것이다.
이 주파수 변조는 주파수 변화율만 알고 있다면 사인파나 톱니파, 삼각파, 또는 어떤 형태의 변조든지 가능하다.
즉, 송신기는 연속적인 신호를 송출하지만 주파수는 알고 있는 패턴으로 변화를 한다.
표적으로부터의 반사 신호는 송신될 때의 신호 주파수와 비교를 하게 된다.
이러한 주파수의 차이는 표적의 거리와 직접적인 비례관계를 갖게 된다.
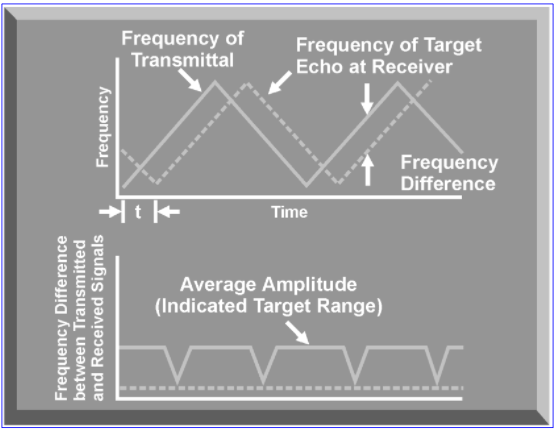
(1) 아래의 그림은 FM CW 레이다가 어떻게 거리를 측정하는 지를 보여준다.
삼각파 변조를 사용하며 송신 신호의 주파수는 실선으로 표시되어 있다.
여기서 한 가지 중요한 것은 아래의 그림은 송신파를 설명한 것이 아니고 주파수가 시간에 따라 어떻게 바뀌는 지를 보여주고 있다는 것이다.
특정 움직임과 관련 없는 표적에 부딪힌 반사 신호는 점선으로 표시되었다.
표적 반사 주파수는 송신 주파수에서 (t) 시간만큼 차이가 생긴다.
또한, 송신 신호와 수신 신호 간에는 주파수 차이도 발생한다.
표적까지의 거리는 이 주파수 차이를 측정하여 계산해야 하며 송신 주파수의 변화율로 나눠줘야 할 것이다.
어떠한 상대적인 움직임도 없는 표적에 대해서는 주파수 변화가 양의 값에서 음의 값으로 바뀌는 아주 짧은 구간을 제외하고는 주파수 차이가 일정한 값을 갖는다.
이러한 “도랑(ditches)”은 거리 계산에서 무시할 수 있으며 평균 크기는 표적 거리와 같게 된다.
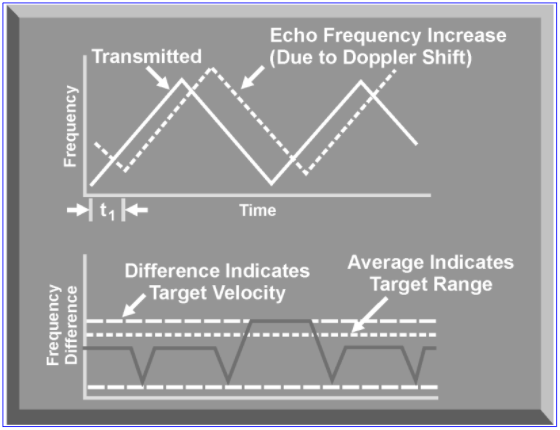
(2) 레이다 방향으로 접근하는 표적에 대해서, FM CW 레이다는 표적 거리와 속도를 측정한다.
다음의 그림은 점선으로 표시된 반사 신호의 주파수가 증가하고 있다.
한번 더 얘기하지만 이 그림은 시간에 대한 주파수 변화를 나타낸 그래프이며 레이다 파의 그림이 아니다.
움직이는 표적에 있어서는 주파수 차이가 변화하는 결과가 나온다.
일정 시간 동안의 주파수 차이를 평균하여 표적 거리 정보를 획득한다.
반면에 표적 속도는 두 주파수 간의 차이를 비교하여 알아낼 수 있다.
(FM CW 레이다의 활용)
FM CW 도플러 레이다의 주요 장점은 거리를 탐지할 수 있는 기능에 클러터 제거 기능을 결합할 수 있다는 것이다.
FM CW 도플러 레이다 활용의 가장 대표적인 예는 항공기의 전파 고도계이다.
또한 HAWK 미사일 시스템은 FM CW 도플러 획득 레이다와 CW 표적 조사기를 사용하고 있다.
(Moving Target Indicator)
펄스 레이다 시스템에서 또 다른 클러터 제거 방법은 특별한 회로나 도플러 처리를 사용하는 것이다.
이러한 특별한 회로는 펄스 레이다의 수신기 단에 추가되어 있으며 MTI(Moving Target Indicator)라고 부른다.
MTI에는 두 가지 타입이 있는데 하나는 non-coherent이고 다른 하나는 coherent이다.
(1) MTI의 초기 버전은 non-coherent MTI 또는 “area” MTI로 불린다.
Non-coherent MTI 레이다는 도플러 주파수 처리를 하지 않는다.
한 스캔을 통한 반사 신호는 다음번 스캔의 반사 신호에서 뺀다.
스캔과 스캔 간의 시간 안에 최소 한 해상도 셀 이상을 이동하는 모든 표적은 표시된다.
그리고 고정 클러터와 표적들은 제거되어 표시되지 않는다.
이러한 형태의 MTI, 클러터 제거기는 반사 신호의 크기와 움직임에 기반한다.
그렇기 때문에 클러터의 레이다 반사 단면적이나 레이다 운용의 불안정, 비나 구름의 변화, 그리고 송신기의 잡음 등에 의해서 클러터 제거기는 절대 완벽할 수 없게 된다.
또 다른 형태의 non-coherent MTI는 움직이는 표적의 반사 신호와 고정된 표적의 반사 신호를 서로 비교하고 고정된 표적은 제거한다.
이러한 형태의 non-coherent MTI는 단순하다.
하지만 coherent MTI 레이다에서 활용하는 클러터 제거 기능은 제공하지 못한다.
(2) Coherent MTI는 펄스 레이다에서 수신된 표적 펄스 상의 위상 변위의 형태로 나타나는 도플러 편이를 이용한다.
Coherent MTI는 STALO(Stable Local Oscillator)와 COHO(Coherent Local Oscillator)를 포함한 복잡한 회로를 사용하여 이러한 위상 변위를 탐지하고 처리한다.
더 나아가 이러한 위상 변위 처리는 각 반사 신호의 속도를 산출한다.
고정 표적과 연관된 속도 성분들은 제거되고 움직이는 표적만 시현되게 된다.
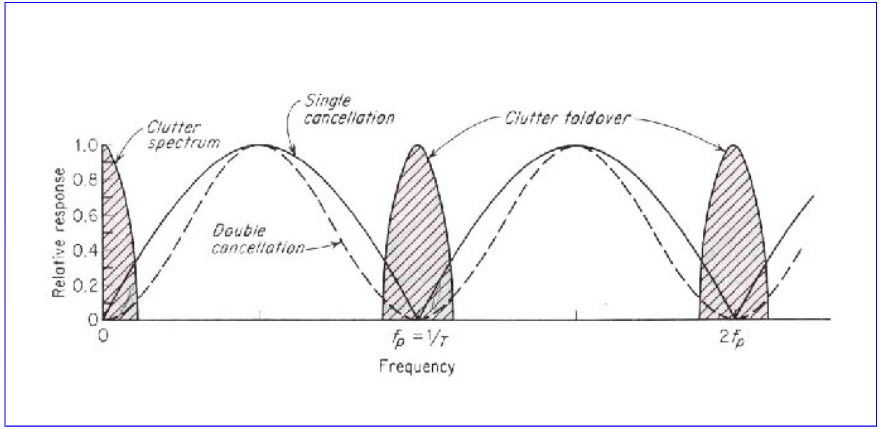
Coherent MTI는 “bling speed”라는 큰 문제점을 갖고 있다.
이 blind speed는 표적의 도플러 주파수가 레이다 PRF와 일치하거나 PRF의 배수와 일치할 때에 발생한다.
즉, 표적이 이러한 도플러 주파수를 만들어 내는 속도로 이동할 때에 반사 신호는 고정된 반사 신호와 함께 제거된다.
(3) 이러한 blind speed를 제한할 수 있는 세 가지의 방법이 있다.
첫 번째는 PRF 스태거(stagger)를 사용하는 것이다.
PRF를 엇갈리게 발생시킴으로써 blind speed와 관련되는 하나의 PRF는 다른 PRF로 커버할 수 있게 된다.
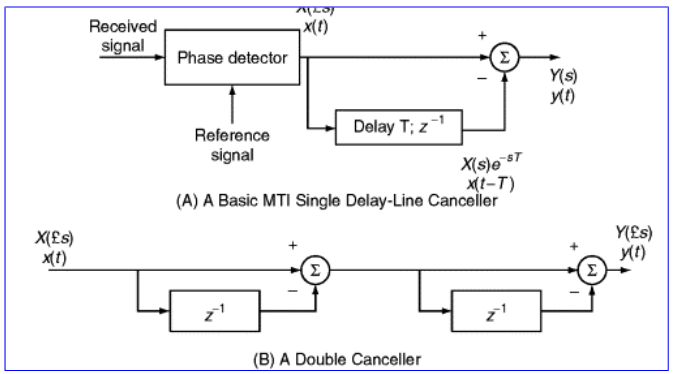
두 번째 방법은 지연 라인 캔슬러(Delay Line Canceler)이다.
이 방법은 다른 처리 전에 각 펄스를 지연시키고 다음 펄스와 비교를 수행한다.
이 방법은 도플러 주파수 비교와 클러터 제거를 좀 더 효과적으로 수행할 수 있게 한다.
세 번째 방법은 거리 게이트와 도플러 필터를 사용하는 것이다.
거리 게이트는 단순히 특정 거리의 특정 표적에 대한 반사 신호가 수신되는 동안만 열어둔다.
예를 들면 10~11 nm 거리에 있는 모든 표적에 대한 거리 게이트를 펄스 송신 후 특정 시간 동안 열었다가 이후에 닫는다.
이 거리에서의 표적 반사 신호는 거리 게이트에 의해 탐지되고 도플러 필터에 의해 속도 성분이 추출된다.
이 거리 게이트에서 탐지된 고정 표적은 도플러 필터에 의해 제거된다.
이러한 복잡한 기법은 펄스 도플러 레이다에서도 사용된다.
[펄스 도플러 레이다 (Pulse Doppler Radar)]
펄스 도플러 레이다는 펄스 레이다와 도플러 레이다의 장점을 합친 레이다이다.
사용하는 신호는 펄스이기 때문에 표적의 거리와 방위, 그리고 고도를 알아낼 수 있으며 펄스 도플러 레이다는 또한 펄스 대 펄스 기반의 레이다 시스템처럼 표적의 접근율과 추월을 계산할 수 있다.
펄스 도플러 레이다는 MTI 레이다와 매우 유사하기 때문에 때때로 두 용어는 상호 교환적으로 사용될 수 있다.
그러나 MTI 레이다는 도플러 주파수 편이를 오직 클러터를 제거하는 데에 사용하는 반면에 펄스 도플러 레이다는 도플러 주파수 편이를 클러터 제거뿐만 아니라 표적의 속도 성분 추적에도 활용한다.
펄스 도플러 레이다는 레이다의 운용 주파수와 같은 RF 에너지를 펄스 또는 박스의 형태로 송출한다.
이 박스 내부의 주파수는 CW 레이다의 연속파와 동일한 역할을 한다.
그러나 RF 파는 펄스 형태이기 때문에 표적에 반사된 신호의 시간을 측정하여 표적의 거리를 알 수 있다.
속도의 측정과 추적 기능은 각 펄스의 도플러 주파수 편이 정도를 탐지하고 계산하여 수행한다.
펄스 도플러 레이다가 단일 표적을 추적할 때에 원뿔형 스캔이나 모노펄스 추적 등을 이용하여 방위와 고도를 알아낸다.
이에 대한 내용은 이전에 다루었으니 넘어가도록 하겠다.
펄스 도플러 레이다가 단일 표적을 추적할 때에 거리 추적은 스플릿 게이트나 leading-edge 거리 추적 루프를 사용한다.
몇몇 펄스 도플러 레이다는 높은 PRF 운용 중 거리 정보를 탐지하기 위해 FM 기법을 적용하기도 한다.
속도 추적을 위해서 각 거리 게이트에는 도플러 필터 뱅크 세트가 있다.
각 RF 에너지의 펄스는 많은 주파수 성분들로 구성된다.
반사된 파형에 있는 많은 다른 주파수들로부터 표적 주파수를 구분하기 위해서 펄스 도플러 레이다는 원치 않는 주파수를 제거하는 필터를 사용한다.
게다가 이 필터는 주파수 편이가 없는 즉, 움직임이 없는 표적에 반사된 신호도 제거한다.
펄스 도플러 레이다가 표적의 거리와 방위 그리고 속도를 추적하는 기능은 레이다의 PRF에 의존한다.
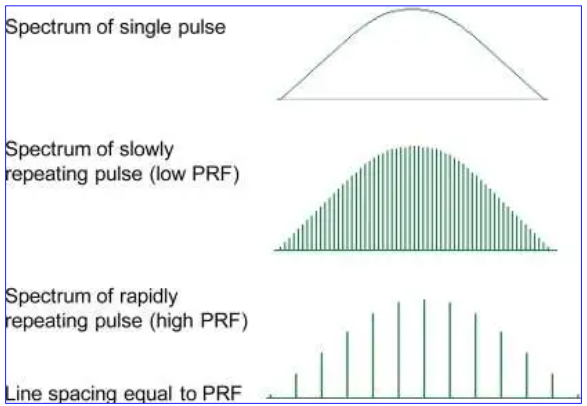
아래의 표는 PRF에 따른 이러한 기능을 정리한 것이다.
낮은 PRF는 스펙트럴 간격 때문에 속도 측정이 매우 어렵다.
하지만 낮은 PRF는 정확한 거리와 방위 그리고 거리 모호성이 매우 길어진다.
중간 PRF는 거리와 방위 속도를 추적하는데 적당하다.
높은 PRF는 속도 해상도가 매우 좋으나 거리 모호성이 짧아 문제가 된다.

펄스 도플러 레이다의 약점은 속도 측정에서의 blind speed와 거리 모호성, 그리고 거리 eclipsing이다.
(속도 Blind Speed)
펄스 도플러의 약점은 아이러니하게도 이 레이다의 가장 큰 장점을 이용한다.
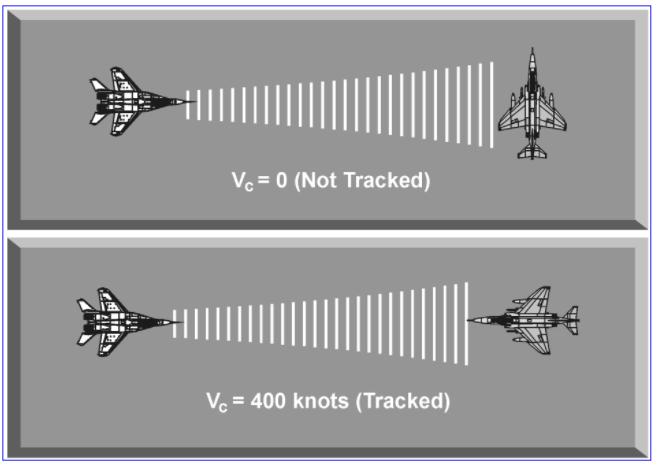
펄스 도플러 레이다는 지상 반사 신호를 제거하도록 설계되었고 그래서 레이다는 지상 클러터에 숨은 항공기를 추적할 수 있다.
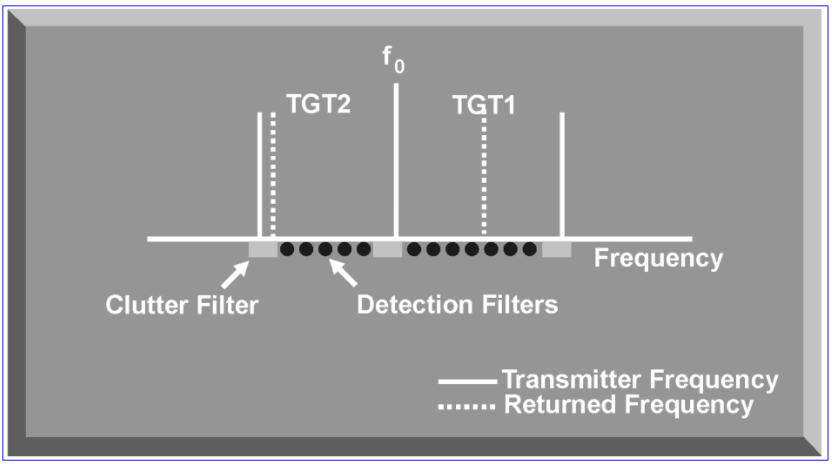
지상 클러터를 제거하고 자동차와 같이 추적을 원치 않는 것들을 피하기 위해서 이 필터는 상대적으로 속도가 적은 성분의 신호들을 제거하도록 설계된다.
그래서 펄스 도플러 레이다의 추적을 피하는 키는 항공기가 상대적으로 작은 속도 성분을 갖도록 하는 것이며 이를 도플러 notch라 부른다.
즉, 아래의 그림과 같이 레이다의 방향에서 90도의 방향으로 이동하는 표적의 속도 성분은 cos90˚이고 값은 0이기 때문에 이러한 표적에 대해서 속도가 매우 낮게 측정되고 이는 필터에 의해 제거되는 것이다.
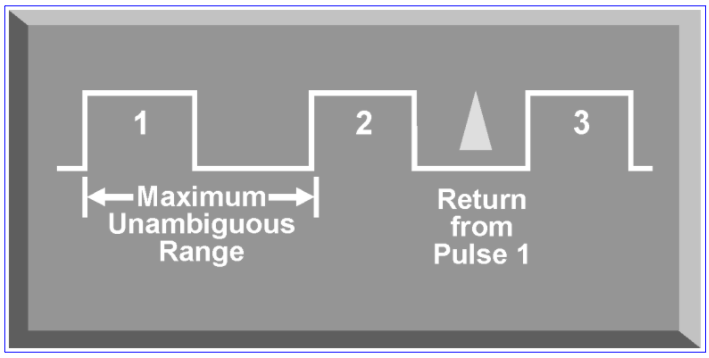
(거리 모호성)
거리 모호성은 주로 멀리 있는 표적을 탐지할 때에 표적에 반사된 신호가 이미 다른 펄스가 송신된 이후에 수신될 때 발생한다.
레이다는 이 반사 신호를 계산할 때에 반사 신호를 생성한 펄스의 시간 때가 아닌 직전에 수행된 펄스의 시간을 가지고 계산하게 된다.
그 결과 잘못된 거리 계산이 된다.
(거리 eclipsing)
거리 eclipsing은 안테나에서 펄스가 송신되는 시점에 표적 반사 신호가 들어올 때 발생한다.
레이다는 송신 중에 수신을 할 수 없기 때문에 어떤 정보도 나타나지 않게 된다.
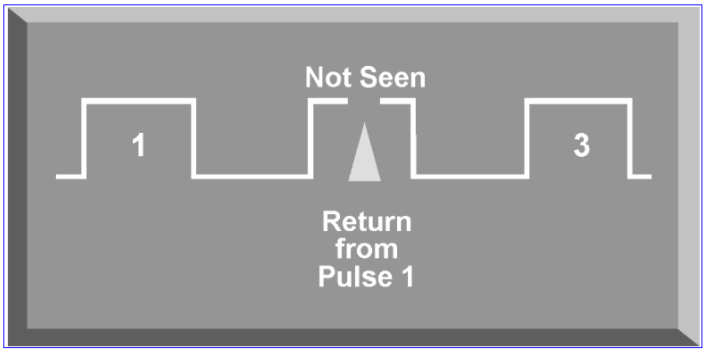
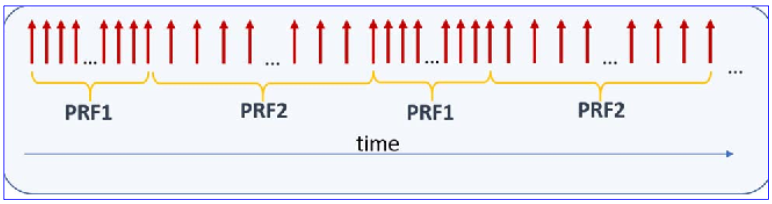
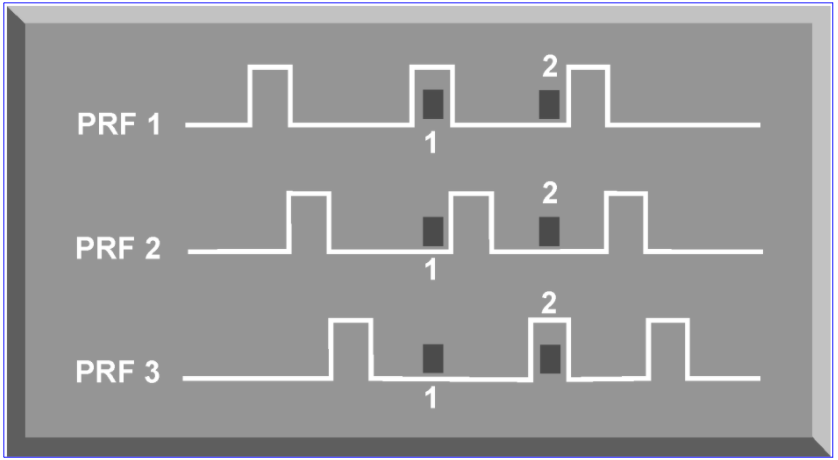
거리 모호성과 거리 eclipsing 문제를 해결하기 위해 펄스 도플러 레이다는 서로 다른 PRF와 컴퓨터 로직을 활용한다.
다음의 그림에서 PRF1은 표적 1의 반사 신호가 eclipsing 되고 표적 2의 반사 신호는 모호성을 갖는다.
PRF를 살짝 변경함으로써 이러한 거리 문제들은 해결된다.
PRF 2에서는 어떠한 반사 신호도 eclipsing 문제는 없다.
그리고 PRF 3에서는 표적 2의 반사 신호가 eclipsing 문제가 있다.
컴퓨터 로직은 이러한 문제들을 상호 보완적으로 해결한다.
여기까지 레이다의 기본 이론을 살펴봤다.
다음 챕터부터는 좀 더 전자전에 직접적인 내용들이 소개될 예정이다.
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| [CHAPTER 8. RADAR MISSILE GUIDANCE TECHNIQUES] - 2부 (0) | 2022.05.06 |
|---|---|
| [CHAPTER 8. RADAR MISSILE GUIDANCE TECHNIQUES] - 1부 (3) | 2022.04.18 |
| [CHAPTER 7. TARGET TRACKING] - 1부 (3) | 2022.03.02 |
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS] - 2부 (1) | 2022.02.03 |
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS]-1부 (4) | 2022.01.16 |




댓글