[원형 스캔 (Circular Scan)]
원형 스캔 레이다는 방위 방향으로 360°를 연속적으로 스캔하는 안테나 시스템을 사용한다.
안테나가 360°를 완전히 회전하는 데 걸리는 시간을 스캔 율(scan rate)이라고 부른다.
Scan duration(한글로 어떻게 표현해야 할지 모르겠음)은 안테나가 영역 전체를 한 번 스캔하는 동안 레이다 빔이 표적을 지나치게 되는데 이때에 표적으로부터 반사된 펄스의 개수 또는 “hits per scan”을 의미한다. (다른 레이다 전문 서적에서는 이를 dwell time이라고 부르고 scan duration은 보통 스캔 시간을 말하는데 이 책에서는 다르게 정의하고 있음)
대부분의 펄스 레이다는 보통 스캔 당 15개~20개의 표적 반사 신호를 수신하면 한 표적을 디스플레이에 보여주기에 충분하다.
이러한 스캔 당 히트되는 펄스의 개수 또는 표적에 반사되는 펄스의 개수를 결정하는 인자에는 펄스 반복 주파수와 안테나의 빔폭, 그리고 scan duration이 있다.
원형 스캔 레이다는 표적 거리와 방위 정보를 제공하며 그렇기 때문에 이러한 레이다는 조기 경보나 초기 표적 획득 레이다에 적합하다.
이러한 임무를 수행하기 위해 안테나는 수직 방향으로는 넓은 빔폭을 갖고 수평 방향으로는 작은 빔폭을 갖는 부채꼴 모양의 펜 빔(fan beam)을 만들어낸다.
보통 표적에 대한 고도 정보는 고도 탐지 레이다가 제공해주기 때문에 수직 방향으로의 빔폭 크기에는 제한이 없다.
이러한 안테나는 조기에 표적을 탐지하기 위해 가능한 넓은 공간을 스캔하며 조기 탐지의 목적은 말 그대로 표적에 대한 빠른 탐지이며 표적의 고도 정확도와 방위 방향 해상도등은 그다음 고려사항이다.
조기 경보를 위한 원형 스캔 레이다는 낮은 PRF(Pulse Repetition Frequency)를 송신한다.
낮은 PRF는 다음 펄스가 송신되기 전까지의 시간이 길기 때문에 송신된 펄스가 먼 거리까지 나아갔다가 되돌아 올 수 있다.
이는 레이다 시스템이 긴 거리 모호성 능력을 갖게해준다.
또한 원형 스캔 레이다는 긴 펄스폭을 사용함으로써 평균 파워를 증가시키고 탐지거리를 늘릴 수 있도록 한다.
조기 경보 레이다의 scan duration은 비교적 길어서 먼 거리에 있는 표적 탐지를 위한 스캔 당 펄스 히트 수를 제공한다.
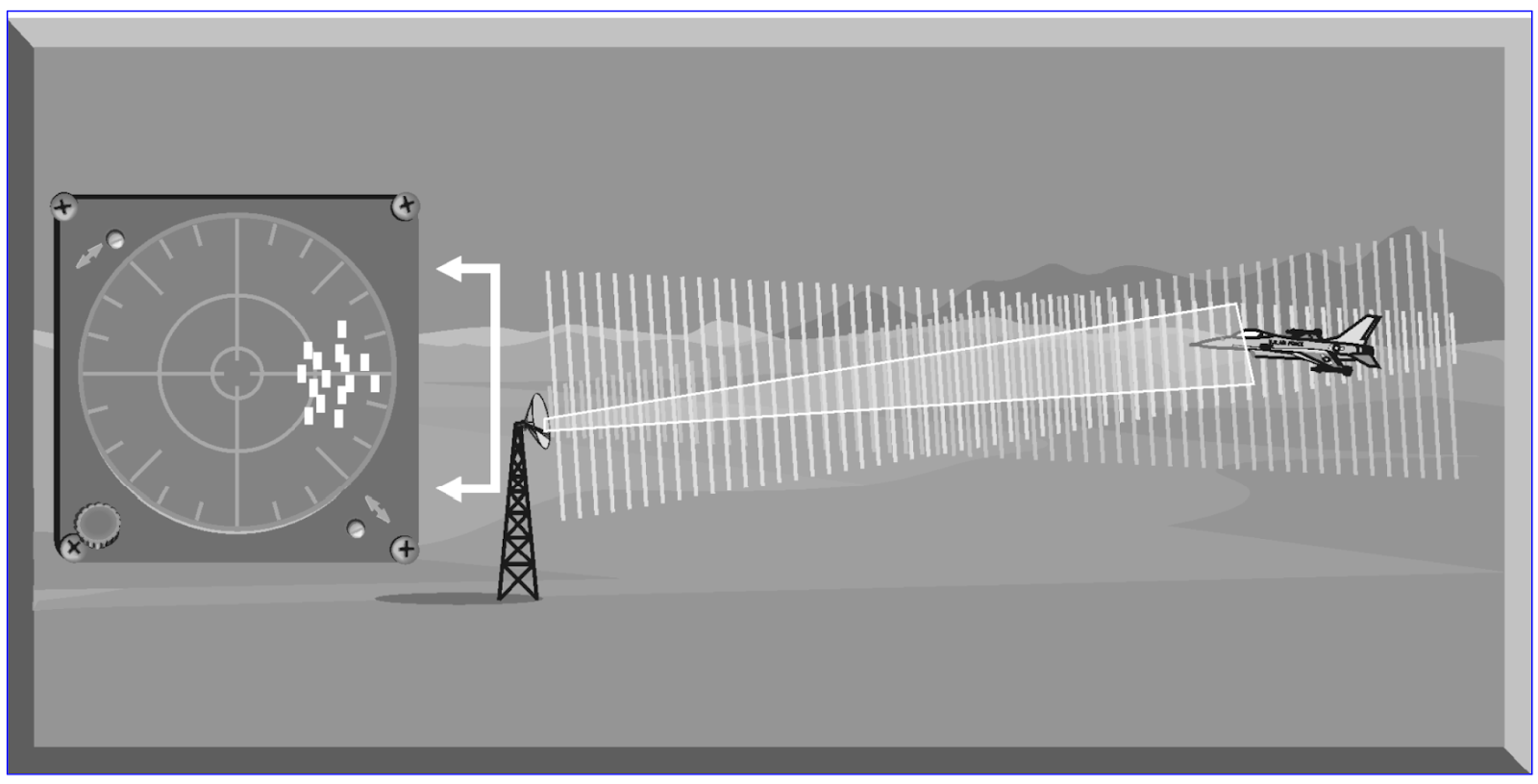
원형 스캔 레이다는 다음의 그림과 같은 PPI(Plan Position Indicator) 스코프를 디스플레이로 사용한다.
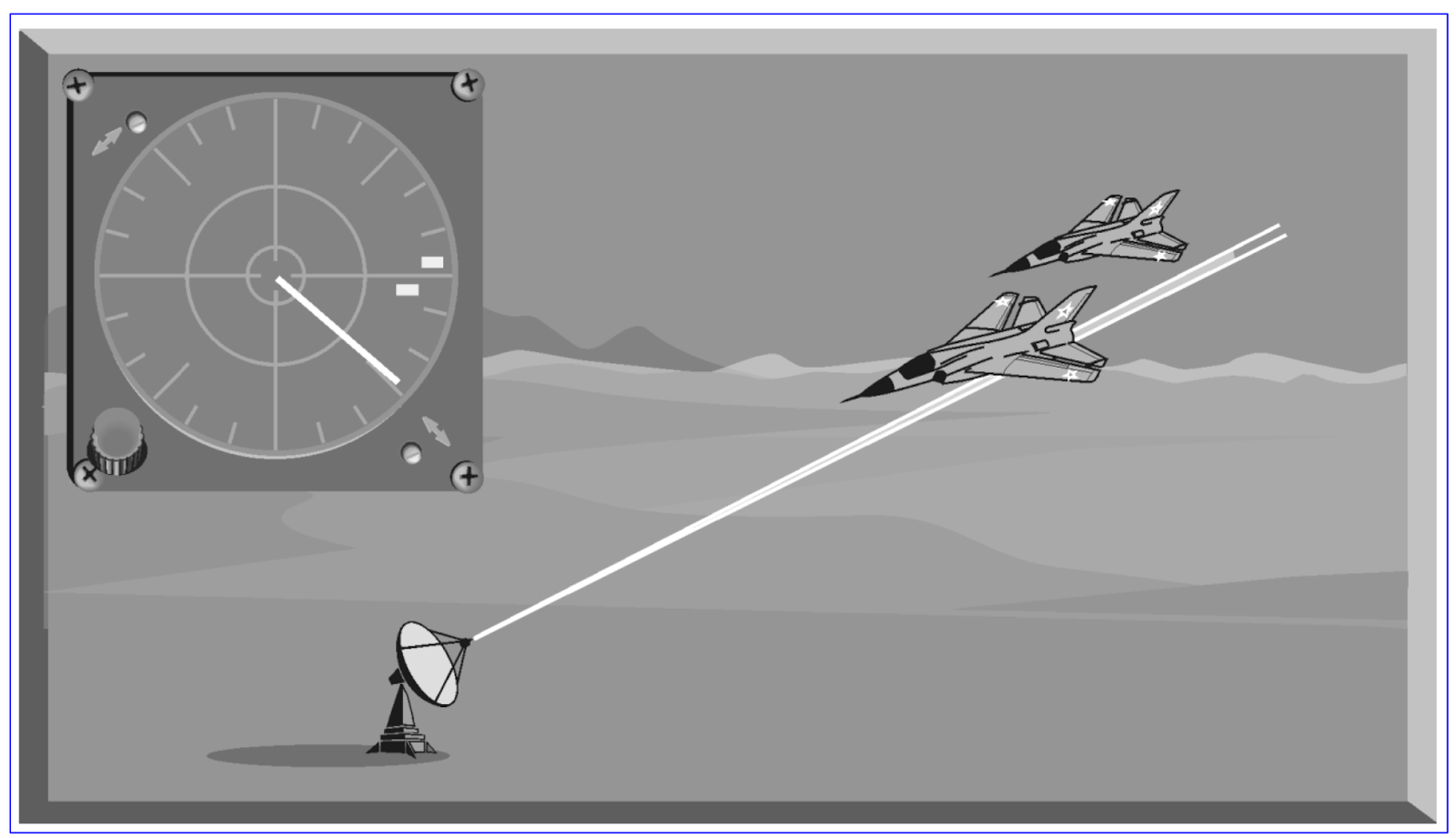
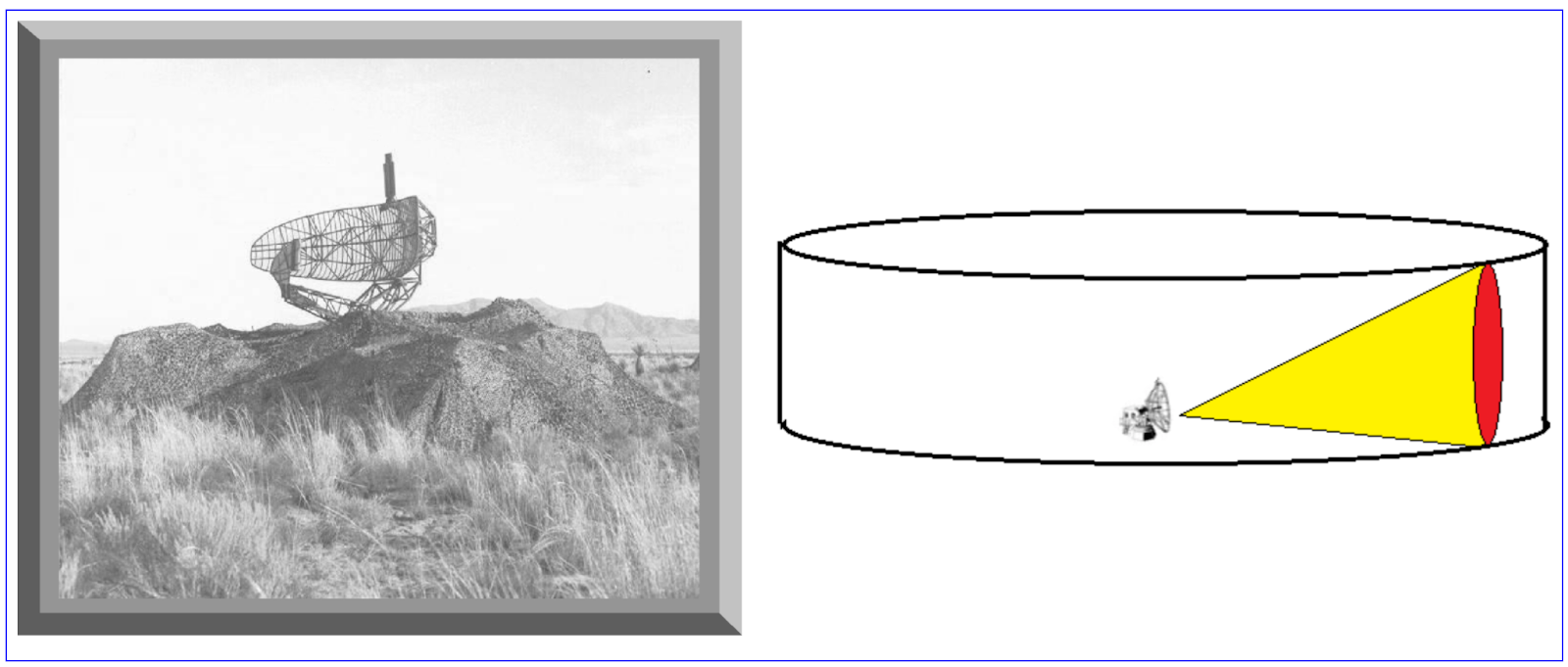
최대한 넓은 공간을 스캔하기 위해 원형 스캔 레이다의 빔폭은 상당히 넓다.
긴 펄스폭과 낮은 PRF 함께 넓은 빔폭으로 인해 원형 스캔 레이다는 넓은 해상도 셀을 갖는다.
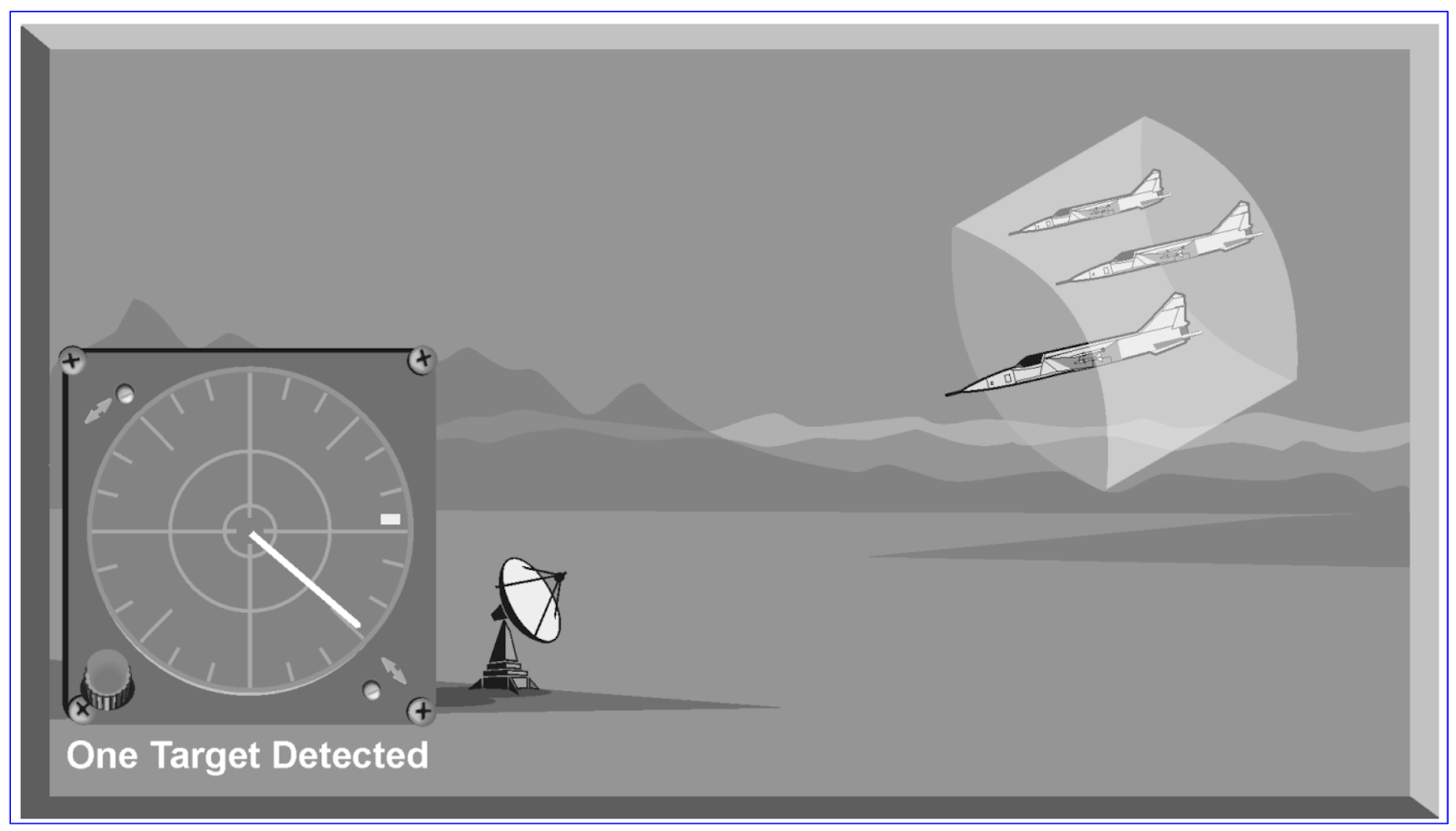
넓은 해상도 셀은 적의 구성이나 규모를 탐지해낼 때에 제약사항이 된다.
그러나 표적이 가까워질수록 해상도 셀은 작아지고 원형 스캔 레이다는 적의 형태를 구분할 수 있게 된다.
원형 스캔 레이다는 조기 경보나 표적 획득 역할에 있어서 표적의 거리와 방위 정보를 제공할 수 있다.
변형된 원형 스캔 레이다는 표적의 고도 정보도 제공할 수 있으며 GCI(Ground Control Intercept) 역할에 사용되기도 한다.
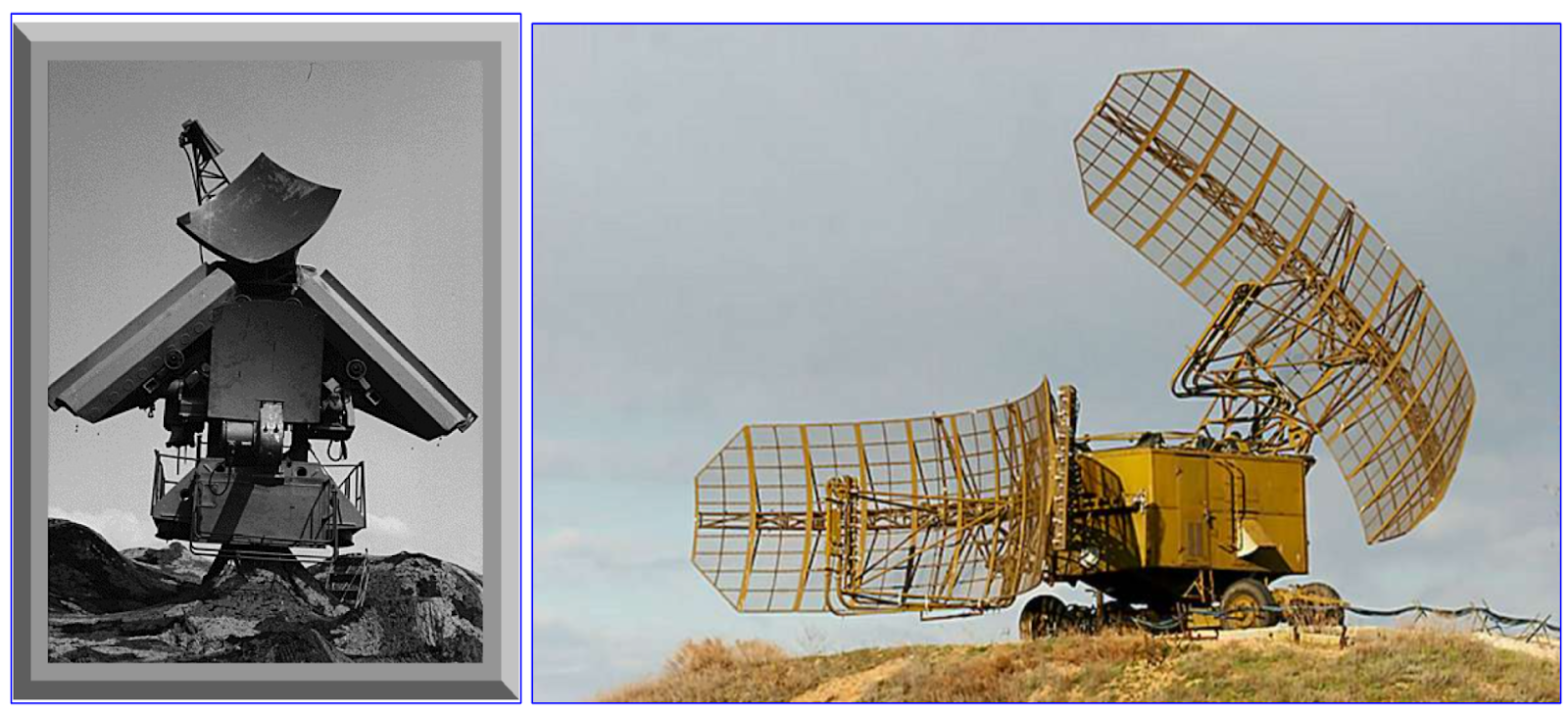
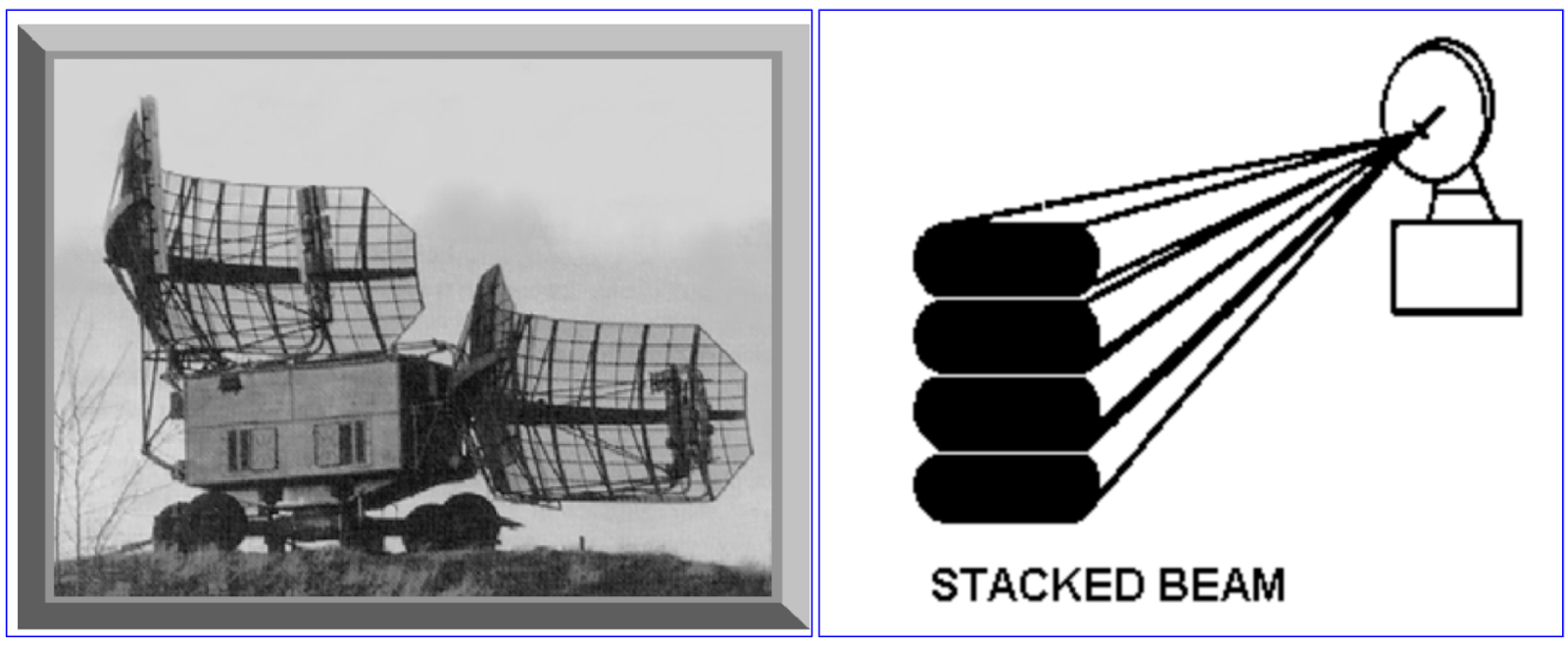
두 개의 변형된 원형 스캔 레이다는 표적의 거리, 방위, 고도를 알아낼 수 있으며 V 빔과 스택 빔(stacked beam)을 사용한다.
(V-Beam 레이다)
V 빔 레이다는 두 개의 펜 형태 빔을 송신하고 두 빔은 서로 스윕 한다.
하나의 수직 방향 빔은 표적에 대한 거리와 방위 정보를 제공하고 두 번째 빔은 특정 각도를 두고 회전하면서 표적의 고도 정보를 제공한다.
(Stacked Beam 레이다)
Stacked beam 레이다는 고도에 따라 각각의 고정되어 있는 빔을 사용하며 각 고도에 고정되어 있는 빔은 방위 방향으로 360°를 회전하는 펜슬 빔(pencil beam)이다.
고도 정보는 어떤 고도를 지향하고 있는 빔에 표적 정보가 포함되어 있는지를 확인함으로써 획득하게 된다.
거리와 방위 정보는 조기 경보 레이다와 동일한 방식을 사용한다.
[선형 스캔 (Linear Scan)]
선형 스캔은 좁은 레이다 빔을 사용하여 넓은 공간을 특정 패턴으로 스윕 하는 레이다 시스템에서 사용된다.
선형 스캔은 고도 탐지 레이다의 경우에는 고도 방향으로 그리고 표적 추적 레이다의 경우에는 수평 방향 또는 래스터(raster)로 할 수 있다.
일반적으로 선형 스캔은 한 축을 커버하는데 매우 우수하며 좀은 빔폭으로 인해 높은 거리 및 고도 해상도를 얻을 수 있다.
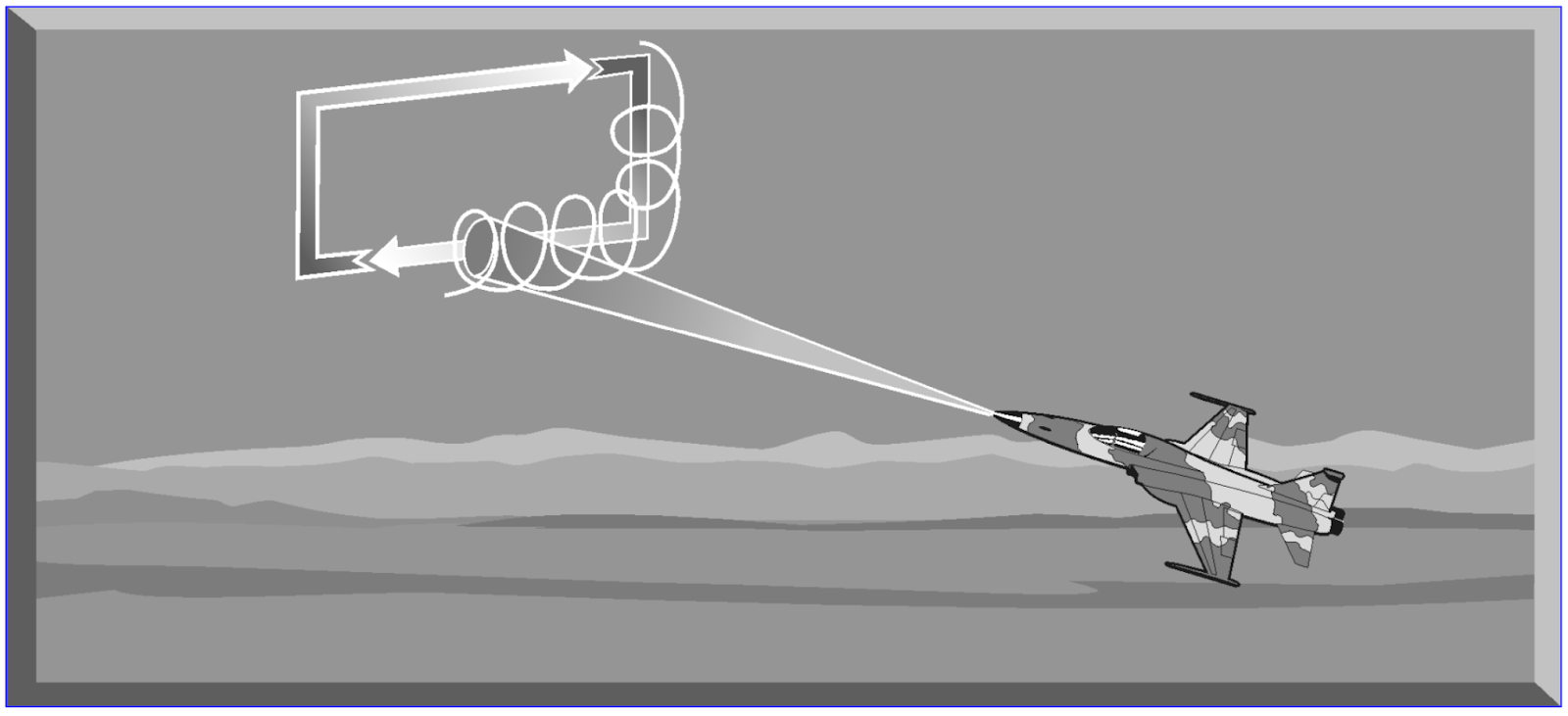
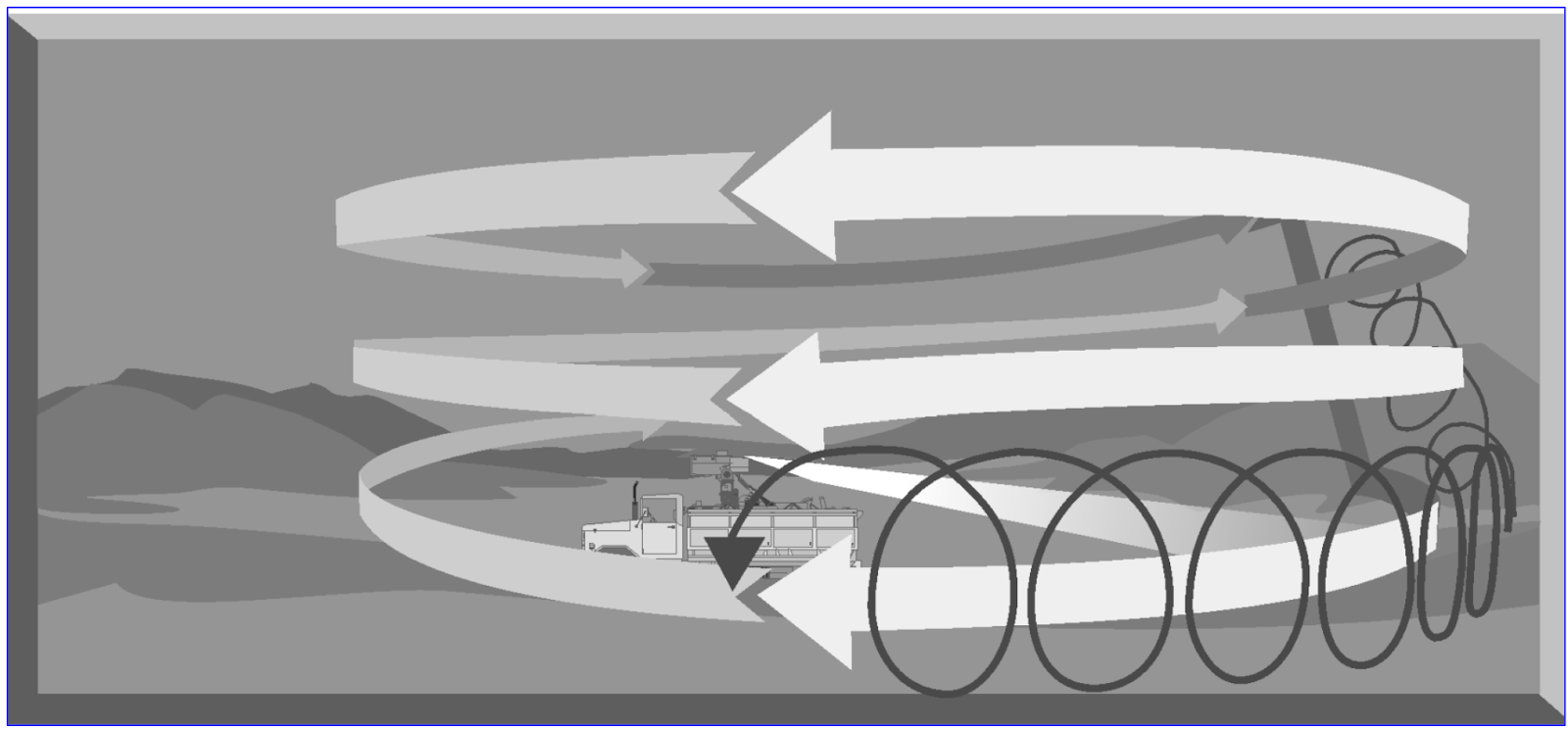
[단방향 스캔(Unidirectional Scan)]
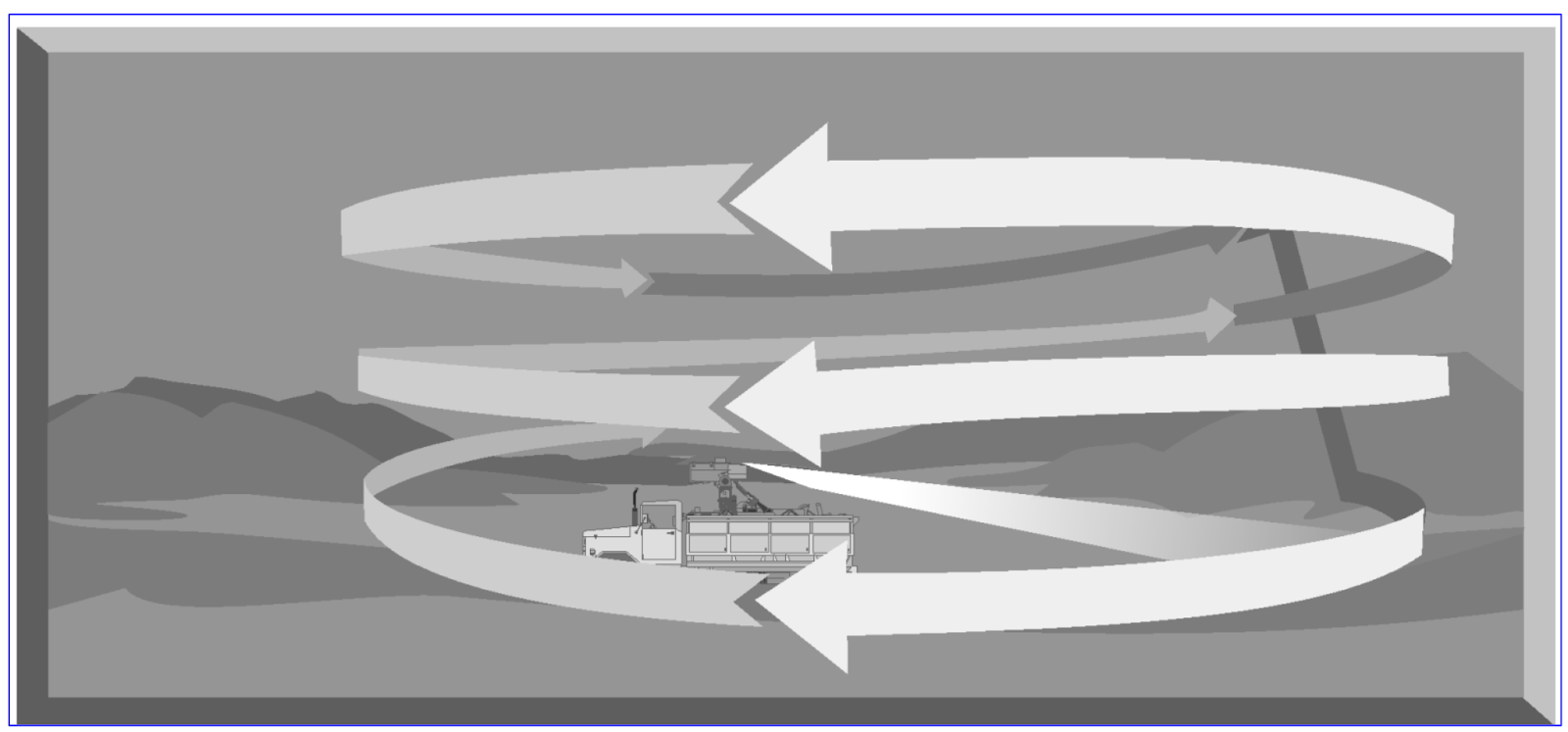
나선형 스캔(helical scan)은 펜슬 빔으로 360° 패턴을 탐지하는 단방향 스캔 패턴이다.
안테나는 360° 공간을 시계 방향으로 스윕 한다.
한 번의 회전이 끝나면 안테나의 고도를 상승시킨다.
이러한 스캔 패턴은 특정 횟수의 회전을 반복하며 아래의 그림은 360° 를 세 번 스윕 하는 패턴을 나타낸다.
스캔 패턴이 끝나면 안테나의 고도는 처음의 고도로 되돌아오고 스캔은 반복된다.
나선형 스캔 패턴은 보통 좁은 수직 및 수평 빔폭을 사용하는 표적 획득 모두에서 사용된다.
[양방향 스캔 (Bidirectional Scan)]
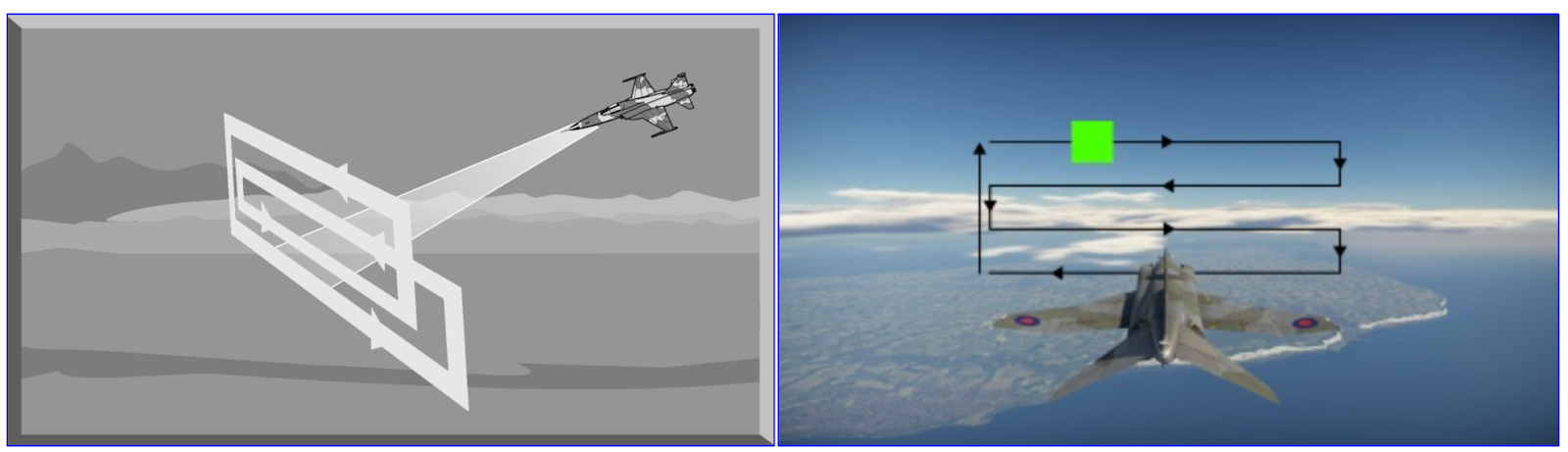
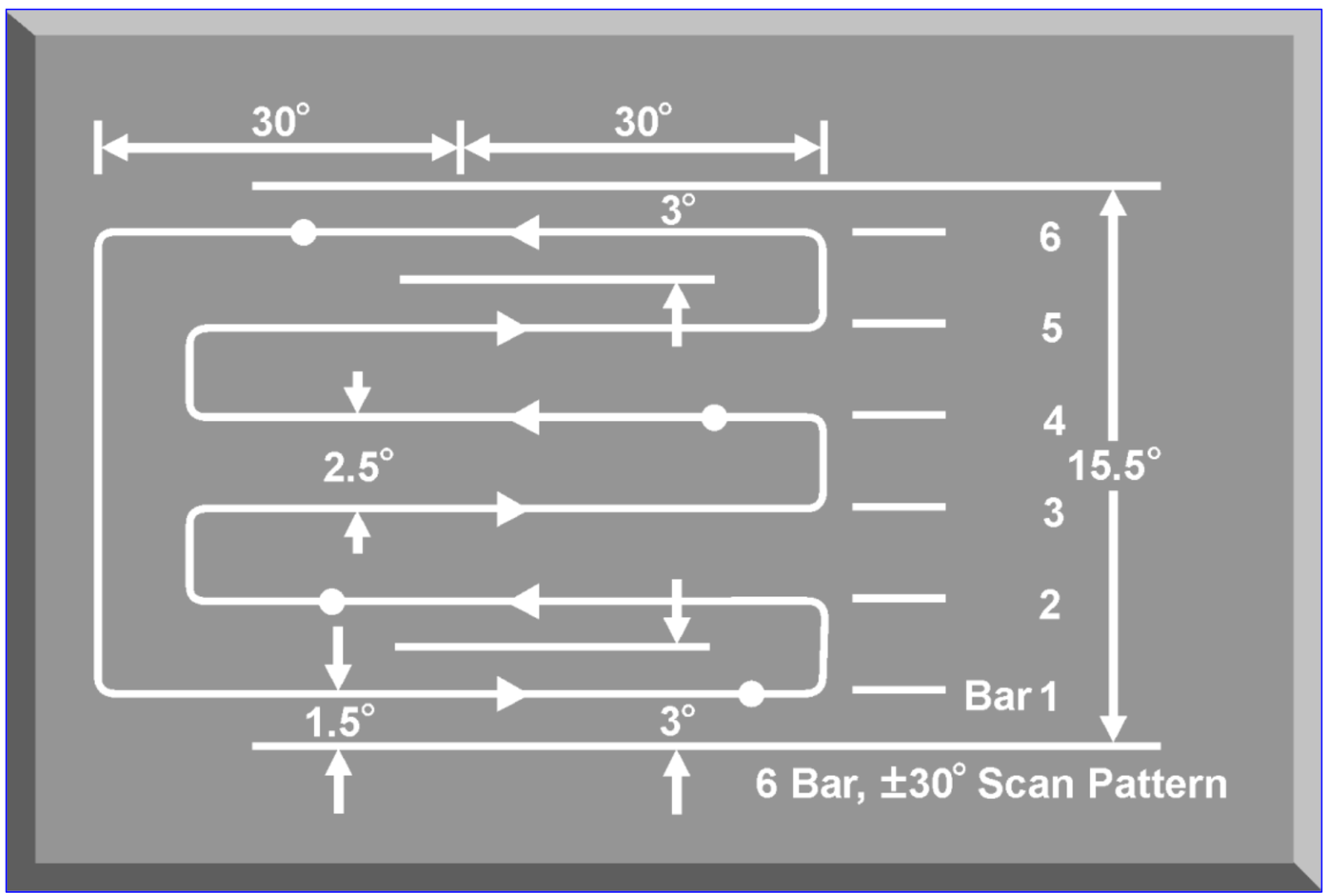
래스터 스캔과 같은 양방향 선형 스캔은 수평과 수직 방향 모두를 스윕 한다.
래스터 스캔은 얇은 빔으로 수평 방향으로 스윕 하면서 직사각형 영역을 탐지한다.
원하는 영역의 수평 스윕이 끝날 때마다 고도 값 점진적으로 증가 또는 감소한다.
영역에 대한 탐지가 끝나면 고도 값은 다시 원래의 초기 값으로 되돌아오고 패턴은 반복된다.
래스터 스캔의 바(bar) 갯 수는 수평 스윕의 갯 수에 따른다.
다음의 그림은 4개의 바를 갖는 래스터 스캔을 나타내며 보통 전투기 레이다에서 사용된다.
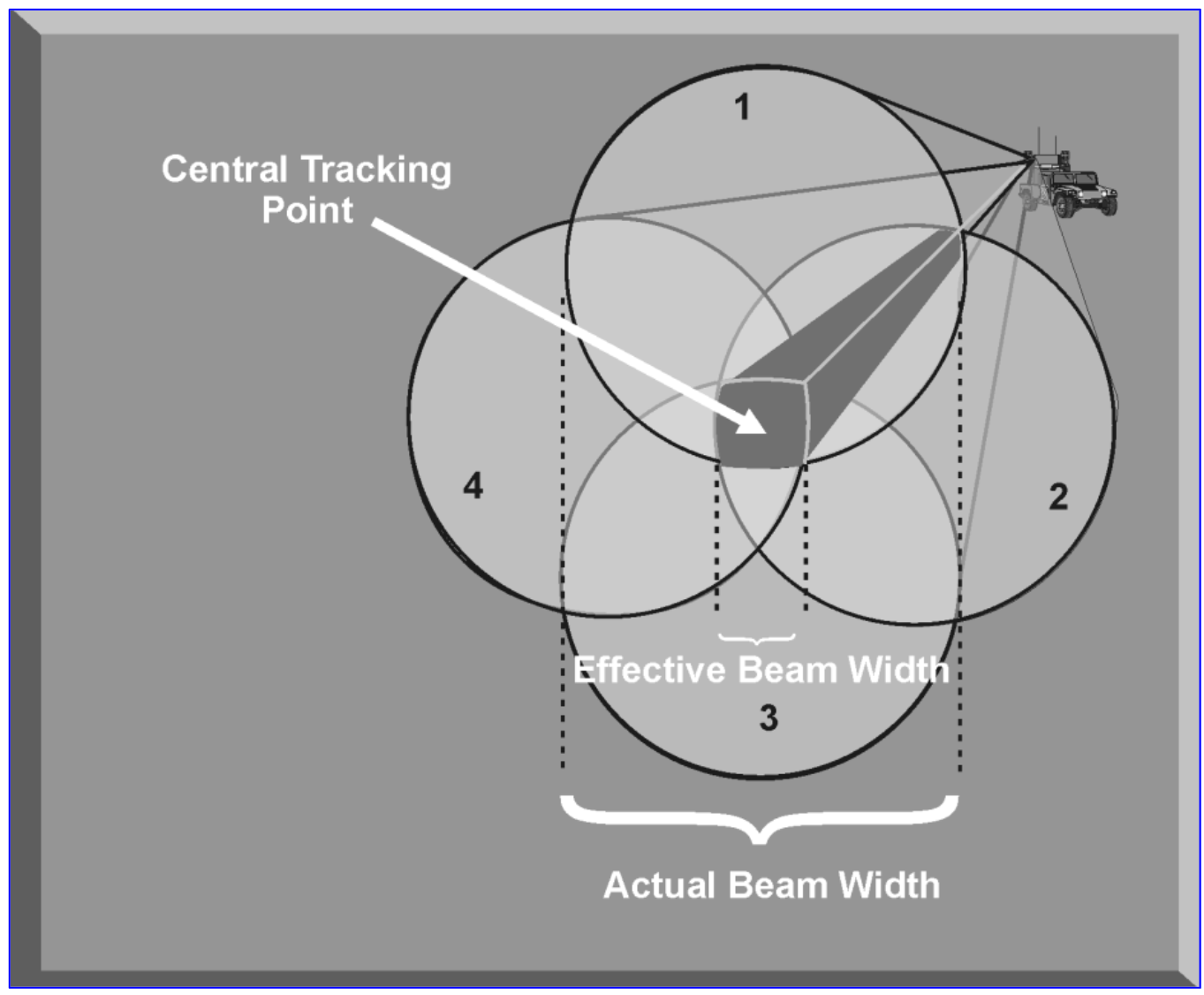
[원추형 스캔 (Conical Scan)]
원추형 스캔 또는 conscan은 주로 정밀한 표적 추적 레이다 시스템에서 사용된다.
원추형 스캔 레이다는 표적 주변을 계속해서 회전하는 펜슬 빔을 적용한다.
펜슬 빔의 원형 회전은 안테나가 원뿔의 꼭지에 위치한 듯한 원뿔 모양의 스캔 패턴을 생성한다.
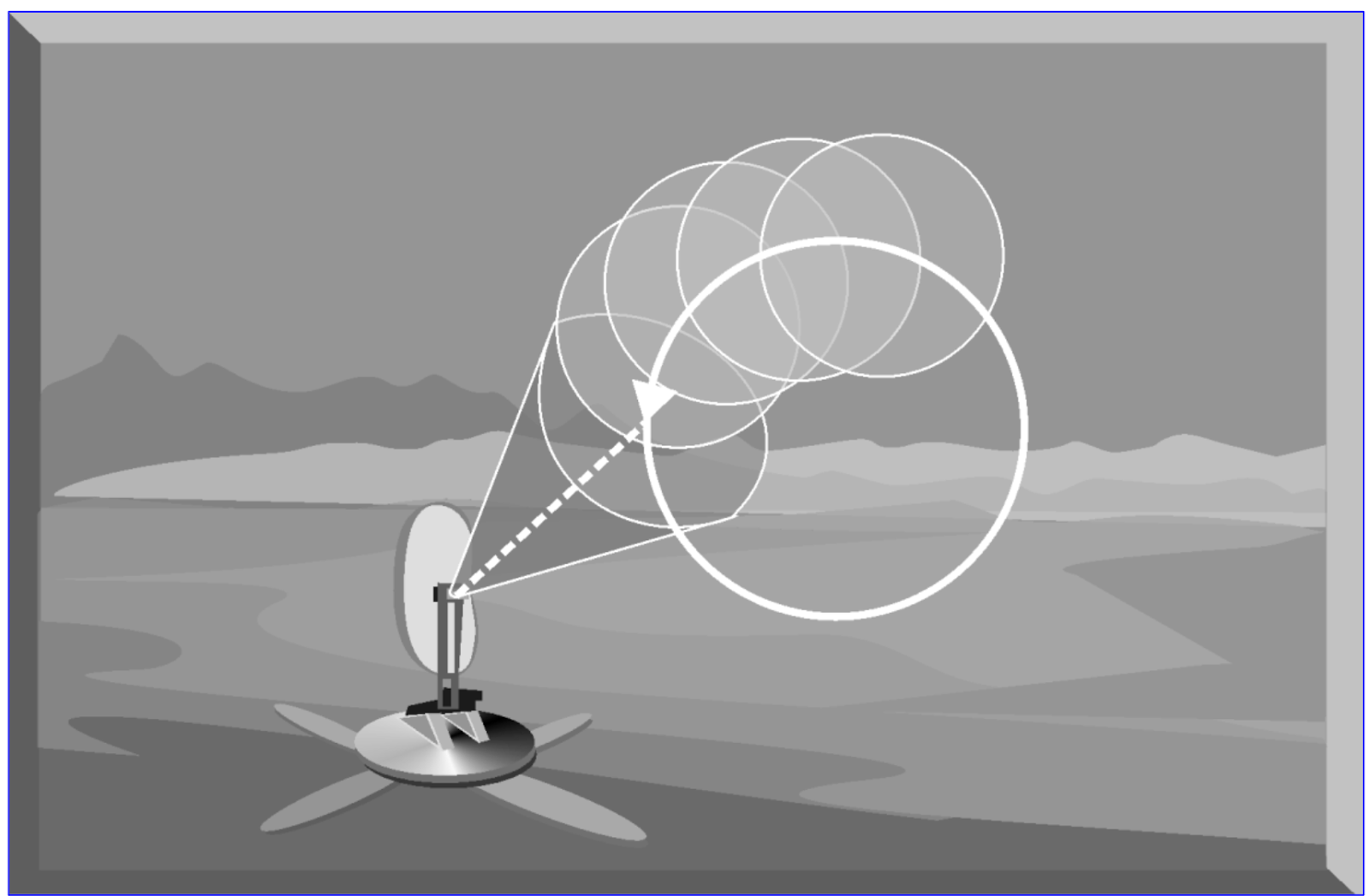
펜슬 빔이 회전하면서 원형 스캔 패턴은 중심 부분이 계속해서 겹치게 된다.
이것은 회전하는 펜슬 빔의 빔폭보다 훨씬 더 작은 유효한 빔폭을 갖는 중심 추적 영역을 만들게 되며 그 결과 매우 정밀한 추적 솔루션이 만들어진다.
원추형 스캔 레이다는 정밀한 표적 추적을 위해 설계되었기 때문에 이러한 레이다는 일반적으로 높은 운용 주파수와 높은 PRF, 좁은 펄스폭, 그리고 좁은 빔폭을 사용한다.
펜슬 빔을 회전시키는 속도는 보통 분당 1,800회를 넘는다.
이것은 초당 30번이 넘는 방위, 고도 데이터의 업데이트가 이루어진다는 의미이다.
원추형 스캔과 래스터 스캔이 합쳐진 것을 Palmer-Raster 스캔이라고 부른다.
Palmer-Raster 스캔은 얇은 빔을 사용하며 공간의 특정 영역을 원추형 스캔으로 스캔한다.
각 영역의 스윕이 끝나면 고도 각도가 점진적으로 증가 또는 감소한다.
수직 방향으로의 영역 탐지가 끝나면 고도 각도는 처음의 위치로 되돌아오고 패턴은 반복된다.
바의 개수는 고도 탐지 스캔의 개수에 따라 정해진다.
원추형 스캔과 원형 스캔이 합쳐진 것을 Palmer 스캔이라 부른다.
Palmer 스캔은 수평 방향으로는 안테나를 원형으로 회전시키면서 탐지를 하고 동시에 원추형 스캔을 수행한다.
만일 레이다 안테나가 이러한 스캔에 단방향 고도 탐지가 합쳐져서 수행되면 이를 Palmer-Helical 스캔이라고 한다.
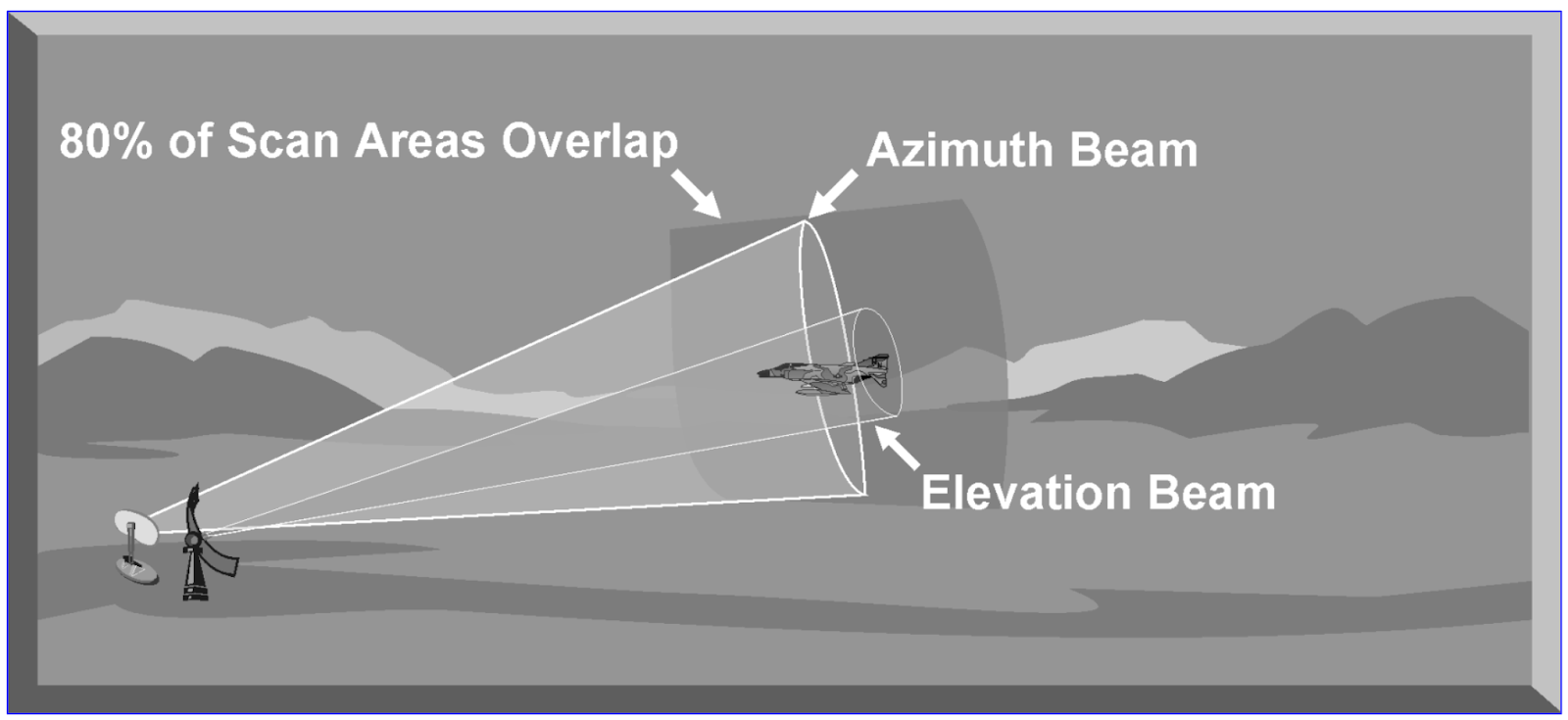
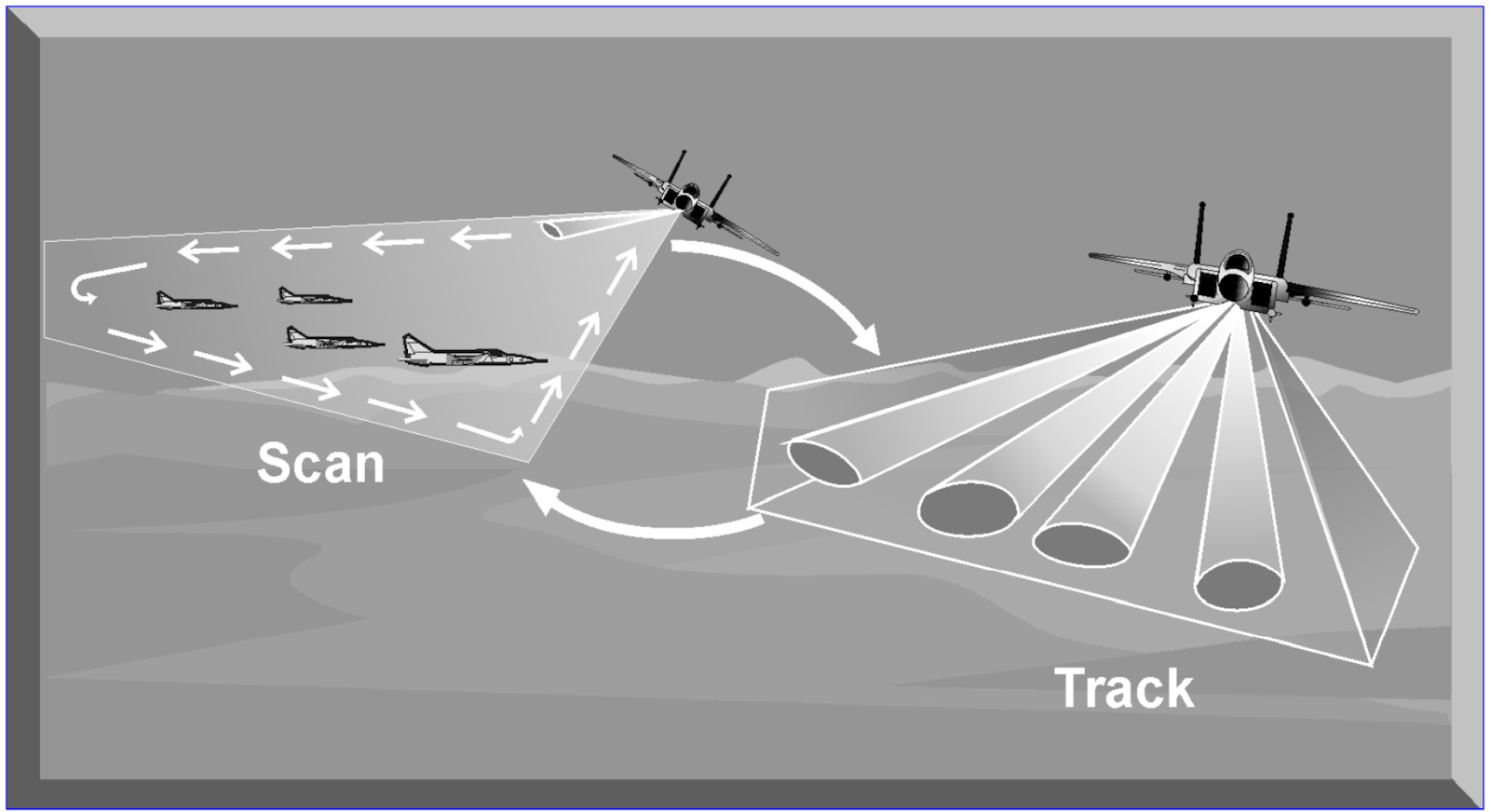
[탐지 중 추적 스캔 (Track-While-Scan)]
탐지 중 추적 스캔 또는 TWS 시스템은 레이다가 탐지를 수행하면서 하나 이상의 표적을 추적할 때에 사용되는 기법이다.
TWS 기능을 갖는 레이다 시스템은 두 개 이상의 서로 다른 레이다 빔을 만들 수 있어야 한다.
전형적인 TWS 레이다는 스캔 기능을 위해 서로 협업하는 두 개의 안테나를 적용한다.
각 안테나는 별도의 단방향 빔을 만들어낸다.
각 빔은 서로 다른 주파수를 송신한다.
수직 안테나는 수직 영역 스캔을 위한 빔을 생성하며 빔폭이 더 좁고 더 빠르게 스캔한다는 것만 제외하고는 고도 탐지 레이다와 유사하다.
수평 안테나는 다른 주파수에서 수평 방향 스캔을 하는 동일한 빔을 만들어낸다.
추적 기능은 두 빔이 서로 통과하는 영역에서 이뤄진다. 이 중심 영역에서 표적의 추적이 이뤄지고 빔이 영역을 스윕 할 때마다 거리 및 고도, 방위 정보가 업데이트된다.
위상배열 레이다는 레이다 설계 분야에서 컴퓨터와 디지털 기술이 결합된 산출물이라 할 수 있다.
위상 배열은 많은 각각의 송신과 수신 소자들이 특정 패턴을 가지고 복잡하게 정렬되어있다.
일반적인 배열에는 선형, 평면형, 곡선형, 그리고 컨퍼멀이 있으며 이 중에서 선형 배열이 가장 일반적이다.
컴퓨터 연산을 이용하여 빠르면서 독립적으로 각각의 소자들을 그룹핑하여 제어함으로써 위상 배열 안테나는 하나 이상의 빔을 만들어 낼 수 있다.
다중 빔과 레이다 반사파의 컴퓨터 연산 처리는 위상 배열 레이다가 TWS 기능을 할 수 있게 한다.
가장 대표적인 위상 배열 레이다의 TWS 기능은 공대공 영역에서의 적용이다.
(1) 각각의 송신과 수신 소자의 개수는 레이다 안테나 크기에 의해 제한된다.
위상 배열 레이다가 추적할 수 있는 표적의 수는 안테나가 생성할 수 있는 빔의 갯 수에 제한된다.
많은 공대공 위상 배열 레이다는 추적과 스캔을 동시에 수행할 수 없다.
그러나 이 두 모드를 빠르게 옮겨 다닐 수 있다면 이러한 제한을 극복할 수 있다.
(2) 최신의 TWS 레이다는 컴퓨터 신호처리와 복잡한 컴퓨터 알고리즘을 통해 표적 상관관계 문제를 단순화시킨다.
다음의 그림처럼 공대공 레이다는 일반적으로 래스터 스캔을 사용하여 공간을 탐지한다.
탐지 모드에서는 레이다는 단순히 공간에서 탐지되는 표적을 레이다 디스플레이에 보여준다.
TWS 모드에서는 레이다는 컴퓨터 프로세싱을 적용하여 표적의 연관성을 알아내고 표적 정보를 업데이트한다.
이것은 자동으로 이뤄지며 그 결과는 디스플레이에 시현된다.
[레이다 스캔에서의 지형 영향성]
어떤 형태의 스캔이 적용되었든 간에 지형은 레이다의 가시선과 표적 탐지에 영향을 준다.
레이다 수평선, 직접적인 지형 마스킹, 그리고 간접적인 지형 마스킹의 개념은 레이다 표적 탐지와 임무 계획에 있어서 중요한 요소들이다.
RF 파는 대기에서 휘거나 굴절되어 똑바른 직선으로 나아가지 못한다.
대기 조건에 따라 굴절되는 정도는 매우 중요한 부분이지만 정확하게 그 양을 예측하는 것은 쉽지 않다.
그렇기 때문에 대부분의 레이다 계산은 RF 파가 일직선으로 나아간다는 가정을 두고 있다.
레이다 수평선은 이러한 가정을 기반으로 한다.
(1) 다음의 레이다 수평선 그림은 지구의 곡면에 영향을 받은 레이다 시스템의 최대 탐지 거리를 나타낸다.
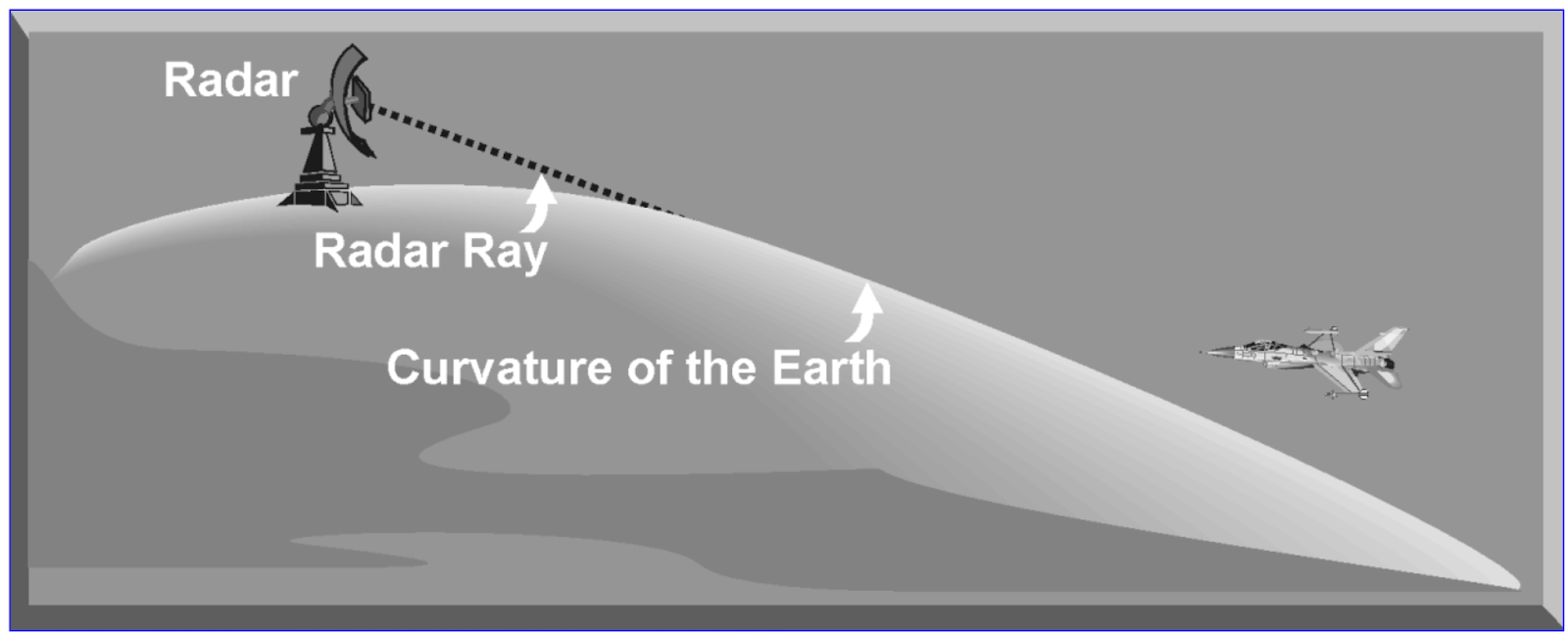
고도 (h)에 있는 레이다 안테나의 수평선까지의 거리 (d)는 다음의 방정식으로 구할 수 있다.

여기서,
k = 상수 (4/3)
a = 지구의 반지름
h = 레이다 안테나 고도
(2) 위의 식에서 상수 k는 RF 파가 직진한다는 가정을 위해 보상하는 값이다.
여기서 지구의 반지름에 비해 안테나의 고도값은 매우 작다고 가정을 하면 측정 거리(nm)와 측정 고도(feet)는 다음의 방정식으로 구할 수 있다.

(3) 위 식의 또 다른 적용은 저고도로 비행하는 표적에 레이다 안테나의 LOS가 달성되는 거리를 구하는 것으로 다음의 방정식과 같다.

(4) 위의 식들을 이용하면 25 feet의 고도에 레이다 안테나가 있고 표적이 100 feet의 고도로 비행하고 있다고 가정할 때에 이 레이다 시스템의 레이다 수평선은 5.3nm이 되고 레이다 안테나는 표적 간의 거리가 16nm가 될 때에 LOS가 됨을 계산할 수 있다.
(직접적인 지형 마스킹)
이제까지는 레이다 수평선을 레이다가 수면이나 평평한 지형에서 동작한다는 가정이 있었다.
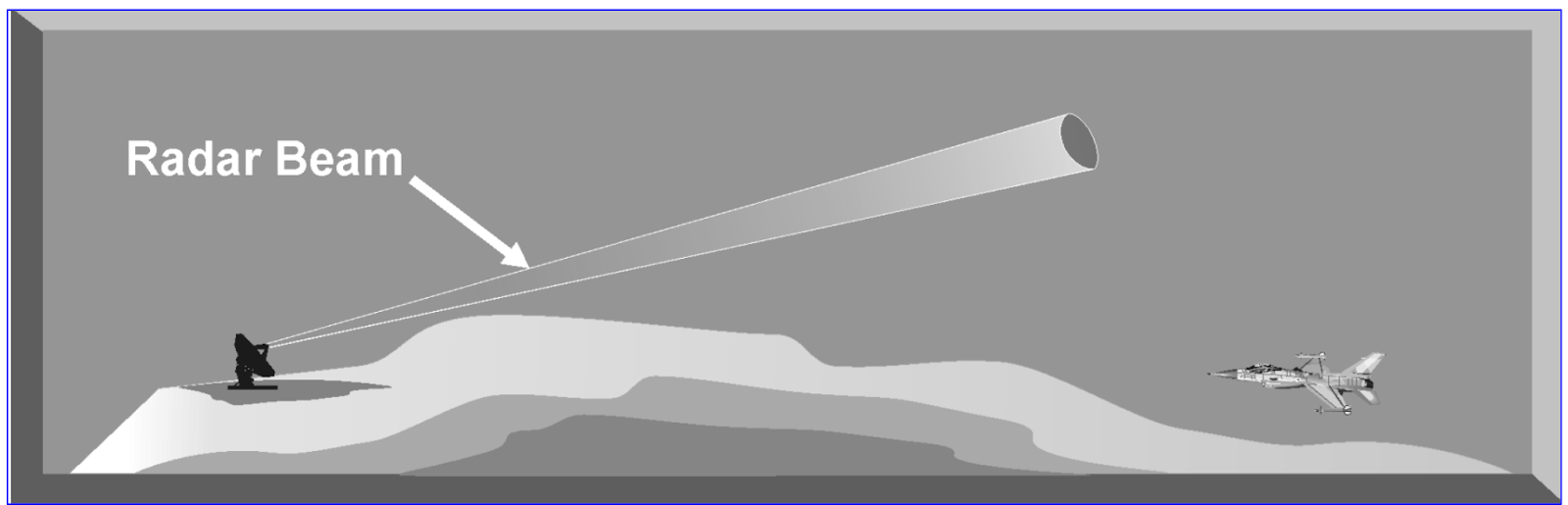
레이다가 굴곡진 지형에서 동작하면 또 다른 레이다 LOS 제한이 발생한다.
다음의 그림은 지형에 의해 레이다 탐지가 제한을 받는 것을 나타낸다.
이 그림에서 산은 레이다 수평선과 같은 역할을 하고 표적 LOS를 제한한다.
이러한 상황을 직접적인 지형 마스킹이라 부른다.
위협 레이다 시스템과 항공기 사이에 이러한 지형을 배치시킴으로써 효과적으로 위협 시스템으로부터 회피할 수 있으며 전투 임무 계획에서 위협 회피에 필수적인 한 부분이다.
(간접적인 지형 마스킹)
다음의 그림은 지형에 의해 표적 탐지에 영향을 받는 또 다른 예를 설명한 것이다.
지형과 표적이 하나의 레이다 빔에 의해 같이 비춰지면 펄스 레이다 시스템은 지형에 의한 반사와 표적에 의한 반사를 구분하지 못할 수 있다.
이러한 간접적인 지형 마스킹은 비행기가 레이다 사이트를 비행할 때에 가장 효과적이다.
펄스 도플러 레이다 시스템은 MTI(Moving Target Indicator) 회로를 적용하여 효과적으로 간접적인 지형 마스킹을 제거할 수 있다.
그렇지만 간접적인 지형 마스킹 또한 전투 임무 계획에 있어 중요한 위협 회피의 고려사항이 된다.
'Electronic Warfare > Study-EW Fundamentals' 카테고리의 다른 글
| [CHAPTER 7. TARGET TRACKING] - 2부 (4) | 2022.03.18 |
|---|---|
| [CHAPTER 7. TARGET TRACKING] - 1부 (3) | 2022.03.02 |
| [CHAPTER 6. ANTENNA CHARACTERISTICS AND SCANS]-1부 (4) | 2022.01.16 |
| [CHAPTER 5. RADAR PRINCIPLES] (7) | 2021.12.26 |
| [CHAPTER 4. RADAR SYSTEM COMPONENTS] (2) | 2021.12.20 |




댓글