다음은 분석한 PRI의 변화가 ELINT 분석가들에게 어떤 의미를 줄 수 있는지에 대해 알아본다.
결과 해석
ELINT 분석가들의 중요한 작업 중에 하나가 PRI 파형을 상세하게 분석하는 것이기는 하지만 또한 이 파형을 레이다 설계와 작동의 측면에서 설명하는 것도 중요한 일이다.
레이다의 동작 측면에서 기능적으로 연관되어 있는 서로 다른 레이다 세트의 펄스들을 동기화시키는 것은 일반적이다.
좋은 예는 고도 탐지(range and elevation) 제어를 하는 탐색 레이다 (Search Radar-range and azimuth)가 되겠다.
동기화를 보여주기 위해서 분석가들은 하나의 신호에 의해 트리거 되는 오실로스코프를 이용해 다른 신호를 관찰할 수 있다. (또는 Raster 디스플레이도 사용될 수 있다)
때때로 전제적인 동기화는 존재하지만 한 세트가 PRI를 제어하는 배수 또는 약수의 주파수에서 동작하는 경우가 있다.
또한 때때로 jitter 특성의 송신 펄스는 PRI를 제어하는 것과 다를 수 있다.
특히 제어되는 세트가 짧은 PRI를 송신할 때 그러하다.
때때로 신호 간의 시간적 관계를 추후 분석하기 위해서 서로 다른 레이다 PRI는 동시에 수집될 수 있으며 서로 다른 사이트에서 수집될 수 있다.
매우 관심이 있는 또 다른 것은 PRI의 변화가 다른 파라미터를 변화하게 만드는 관계이다.
즉, 일정한 듀티 사이클을 유지하기 위해서 펄스의 지속시간이 변화한다든지 아니면 빔 폭 당 펄스의 개수를 일정하게 하기 위한 스캔의 변화등이 있다.
가장 많은 관심이 있는 것은 외부의 이벤트와 함께 파라미터가 변화하는 관계이다.
레이다, 다른 파라미터, 이벤트에 대한 PRI의 관계에 더해 관찰되는 PRI와 이를 생성하는 회로적인 관계와 같은 더욱 기본적인 관계도 있다.
매우 정밀한 PRI 변화의 관찰 후에 ELINT 분석가들은 PRI의 소스로서 회로의 타입에 대한 정보를 알아낼 수 있다.
[ Crystal Oscillators and Countdown Circuits ]
Quartz-crystal 제어 oscillator(발진기)는 레이다 PRI를 제어하는데 수년간 사용되어왔다.
그 이유 중 하나는 레이다는 거리 측정을 위해 정확한 기준 시간이 필요하며 그래서 발진기가 사용되고 있다.
크리스탈 발진기는 보통 레이다 PRF 보다 높은 주파수 대역에서 동작하기 때문에 디지털이나 다른 타입의 주파수 분할기 또는 “카운트다운”이 필요하다.
다중의 position stagger, 수도 랜덤 jitter, 그리고 PRI switching은 이 카운트다운 회로를 재프로그래밍 함으로써 쉽게 구현할 수 있다.
크리스탈 발진기가 고정된 주파수에서 사용되는 것으로 생각되지만 작은 주파수 변화(0.1%이하)는 발진기의 공진 회로에 있는 가변 캐패시터를 조절하여 구현할 수 있다.
온도 역시 평균 PRI에 변화를 일으킬 수 있다.
그러나 장기간의 drift는 보통 1/105보다 작다.
매우 정확한 레이다 평균 PRI의 측정은 레이다 별 차이를 보여줄 수 있다.
그 이유는 레이다의 크리스탈 발진기는 평균 주파수에서 아주 작은 차이를 갖고 있기 때문이다.
ELINT 분석가들은 크리스탈 기반의 PRI 생성기는 매우 안정적이며 PRI의 모든 변화는 기본 간격의 정수 배수라는 것을 알아야 한다.
이 기본이 되는 간격을 찾는 것은 관찰된 모든 PRI의 최대 공약수를 찾는 것과 같다.
이 값은 PRI 생성을 제어하는 크리스탈 발진기의 주파수의 역수일 수 있다.
ELINT 데이터에서 카운트다운 정수를 찾는 방법을 알기 위해서 다음의 예제를 참고한다.
레이다 펄스 열이 분석되었고 다음의 가격이 찾아졌다.
(1) 2,440.8 ㎲
(2) 2,428.7 ㎲
(3) 2,465.3 ㎲
(4) 2, 453.1 ㎲
(5) 2,562.9 ㎲
간격은 예측 불가한 연속으로 발생했으며 이는 디스크리트 한 랜덤 jitter이다.
다음 단계는 이 값들을 작은 수부터 큰 수의 순으로 정렬하여 값의 차를 보는 것이며 다음과 같다.
(1) 2,428.7 ㎲
(2) 2,440.8 ㎲ / 12.1 ㎲
(3) 2,453.1 ㎲ / 12.3 ㎲
(4) 2,465.3 ㎲ / 12.2 ㎲
(5) 2,562.9 ㎲ / 97.6 ㎲
가장 작은 차가 기본 발진 주기일 가능성 높다.
모든 다른 차들은 기본 주기의 정수배가 되어야 한다.
이 예에서는 처음의 세 가지 차값들은 거의 비슷한 값들이다.
여기서 명심해야 할 것은 측정의 해상도가 0.1 ㎲이라는 것이며, 가장 좋은 선택은 이 12.1과 12.2, 12.3의 평균을 낸 12.2를 시작 값으로 선정하는 것이다.
다른 차 값은 12.2의 8배가 되며 이는 이 값을 사용한다는 것을 나타낸다.
다음은 가장 작은 차값에 대한 관찰된 PRI 간격의 비를 구하는 것이고 정수에 가까운 비율을 결정한다.
만약 데이터의 양이 많다면, PRI의 비율을 히스토그램으로 만들 수 있으며 기본 간격을 가정할 수 있다.
이 히스토그램은 비율이 다양한 상수와 얼마나 가까운지를 보여줄 수 있다.
히스토그램은 또한 만약 상수 간에 패턴을 가진 값이 있다면 기본 발진 주기는 실제로 특정 상수로 나눠진 값이란 예측이 가능하다.
[ PRI and Range velocity ambiguities ]
현대의 펄스 도플러 레이다 시스템에서 PRI 시퀀스가 관찰되었고 그 특성이 구분되었다면 이 시퀀스가 갖는 목적이 무엇인지를 결정하려는 시도는 당연한 것이다.
이를 위한 한 가지 방법은 각 PRI에서 가려지는 거리와 blind 속도를 그려보는 것이고 이후 이를 겹쳐서 예상되는 거리와 속도 상에 얼마나 PRI가 겹치는지를 보는 것이다.
만약 PRI가 거리나 속도에 겹치지 않는다면 이 시퀀스는 어떤 다른 목적을 가지고 있는 것이다.
이 동일한 기본 방법은 서로 다른 PRI를 사용하여 거리와 속도 모호성을 해결하기 위해 사용하는 것과 동일하다.
다음의 예는 어떻게 거리 모호성을 해결하는지를 보여준다.
PRI가 40 ㎲을 갖는 레이다가 있다고 가정해 보자.
이 레이다에서 마지막으로 송신한 펄스 이후에 12 ㎲ 지연 후에 표적 반사가 있었다.
이 경우 최대 모호성 거리는 6 km가 되며 표적까지의 거리는 1.8 km이다.
몇 개의 펄스 이후에 PRI가 30 ㎲으로 변경되고 표적 반사는 2 ㎲에서 관측되었다.
이때의 최대 모호성 거리는 4.5 km가 되고 표적의 거리는 300m가 된다.
PRI가 변경될 때에 표적까지의 거리도 바뀐다는 것은 실제 표적까지의 거리는 다르다는 것을 말해준다.
실제 거리 지연은 특정 정수 배에 40 ㎲와 12 ㎲를 더한 것이며 또한 다른 정수배에 30 ㎲과 2 ㎲를 더한 것이기도 하다.
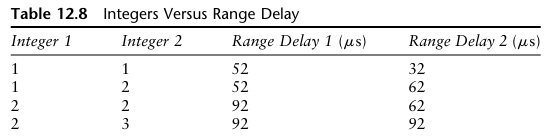
표의 마지막 두 칼럼이 같아질 때 조건은 만족하며 따라서 실제 거리 지연은 92 ㎲이다.
이러한 레이다의 경우 최대 모호성 거리는 PRI 값의 최소공배수를 하여 구할 수 있으며 여기서는 120 ㎲가 된다.
한 가지 명심할 것은 다중의 PRI를 사용하는 것은 만약 동일한 각도 셀에 다중의 표적이 있다면 매우 복잡해진다는 것이다.
[ MTI Radar Blind Speeds ]
MTI 레이다는 표적의 속도를 측정하지 않는다.
대신에 움직이지 않는 표적으로부터의 반사신호를 제거한다.
이것은 다음의 펄스에서 한 펄스의 반사 위상을 뺌으로써 가능하다.
만약 위상이 변화하지 않는다면 결과는 제로가 되고 고정된 표적은 각 반사신호에서 거의 동일한 위상을 생성한다.
그러나 만약 한 PRI 내에서 반사 신호 위상이 360도 변화한다면 이것 역시 거의 완전히 상쇄된다.
그러므로 blind 속도는 PRI 동안에 파장의 정수배만큼 표적이 레이다를 향해 방사형으로 움직이는 속도를 말한다.

예를 들면, 6 GHz 주파수와 2,500 ㎲의 PRI를 갖는 레이다는 10m/s 또는 36 km/h의 배수로 blind 속도를 갖는다.
만약 레이다가 stagger를 더해 2,500 ㎲의 PRI가 3,000 ㎲ PRI로 변경된다면 blind 속도는 8.333 m/s의 배수가 된다.
레이다의 평균 PRI가 2,750 ㎲이고 blind 속도는 9.0909 m/s가 된다.
Stagger PRI의 blind 속도는 각 blind 속도의 정수배 중에서 가장 낮은 값이며 여기에서는 50 m/s이다. (5X10와 6X8.333)
또 다른 stagger를 보는 것은 정수 비율로 PRI를 줄이는 것이다.
즉, 3,000:2,500 = 6:5. 또는 평균 PRI에서의 blind 속도에 두 상수의 평균을 곱하는 것이다. (9.0909 X 5.5 = 50 m/s)
만약 PRI들이 서로 가까이에 있다면 실제 blind 속도는 꽤 커질 수 있다.
[ Moving Target Detection ]
MTD(Moving Target Detection)은 MTI와 도플러 필터링의 조합이다.
표적의 속도 자체는 측정되지 않는다.
즉, 추가적인 클러터 제거가 협대역 필터에 의해서 제거되고 잡음이 없는 신호가 된다.
ELINT의 관점에서 보면 레이다는 낮은 PRF를 가지나 간격은 dwell switch와 유사한 패턴을 갖는다.
제거 이후에 필터링을 가능하게 하기 위해 PRI는 충분히 긴 시간 동안 일정하게 남아있어야만 하며 이 제거기와 FFT 프로세서를 채울 수 있어야 한다.
일반적으로 이러한 방식은 10 PRI를 요구할 수 있으며(2개는 제거기를 위해 남은 8개는 FFT를 위해) 마지막의 필터 대역폭을 PRF/8로 줄여준다.
FAA ASR 레이다는 세 펄스 제거기를 통해 25 dB의 개선 지수를 갖으며 여기에 8 펄스 FFT가 더해지면 개선 지수는 45dB만큼 증가한다.
이러한 타입의 레이다는 PRI가 10개 수준을 갖는다.
그러나 blind 속도에 대한 문제는 여전히 남아 있다.
따라서 모든 표적들이 그들의 속도에 관계없이 탐지될 수 있도록 일련의 간격 값을 가져야만 한다.
여기까지 책 "ELINT- The Interception and Analysis of Radar Signals"에서 소개하고 있는 PRI 분석에 대해 6부에 걸쳐서 알아봤으며 PRI를 분석하는 방법과 ELINT 분석가의 입장에서 이러한 PRI의 변화가 레이다 신호를 분석함에 있어서 어떤 의미를 갖는지를 알 수 있었다.
그러나 공부하기 전에는 좀 더 실질적인 내용을 포함하고 있을 줄 알았는데, 이보다는 이론적인 부분을 더 많이 다루고 있었고 한번 봐서는 다 이해할 수 없는 내용들이 있었다.
한 번에 책에서 말하고 있는 내용을 모두 이해한다기보다는 어느 수준의 무슨 내용을 말하고 있는지 전체적으로 이해한 것에 만족한다.
출처 : ELINT- The Interception and Analysis of Radar Signals
'Electronic Warfare > EW Technology' 카테고리의 다른 글
| 자체 추력을 갖는 능동형 전자전 디코이 장점과 대응책 - (2) (13) | 2025.08.28 |
|---|---|
| 자체 추력을 갖는 능동형 전자전 디코이 장점과 대응책 - (1) (11) | 2025.08.25 |
| Pulse Repetition Interval Analysis -(5) (2) | 2025.05.25 |
| Pulse Repetition Interval Analysis - (4) (1) | 2025.05.01 |
| Pulse Repetition Interval Analysis - (3) (3) | 2025.04.28 |


