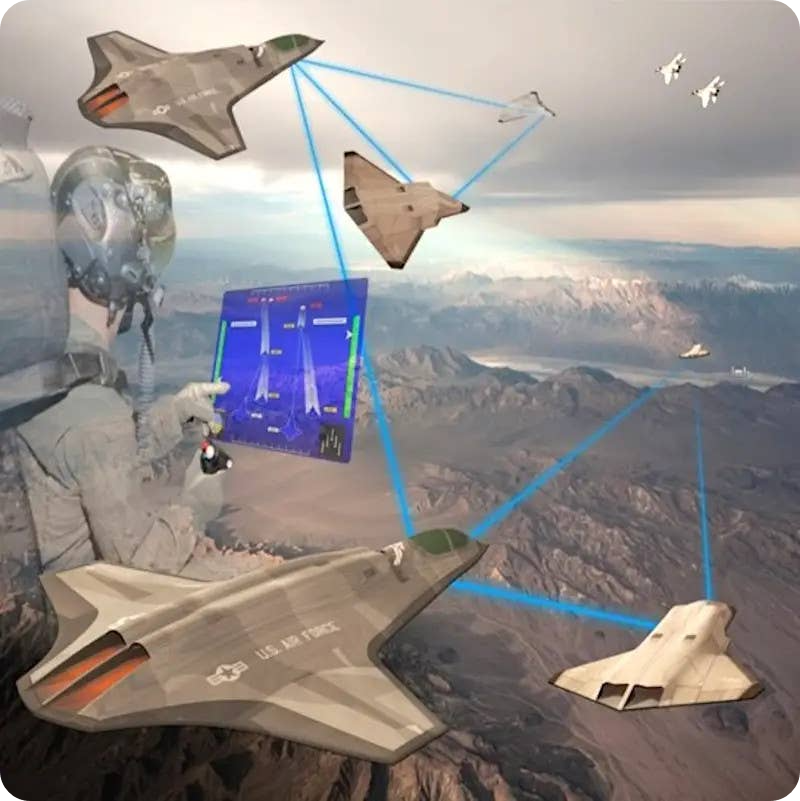
Lockheed의 유-무인 공중 전투팀의 비전은 드론에 대한 비중을 높이고 유인 전투기의 지원을 최소화하는 것이다.

Lockheed Martin사의 Skunk Works 선행 프로젝트 부서는 인간 중심적이면서 유연한 자동화 프레임워크를 개발하고 진화시키는 계획을 추진하고 있다.
이는 다양한 수준의 무인 항공기가 다양한 자율성을 갖으면서 유인 카운터파트와 협업이 가능하게 하는 인공지능 기반의 제어 시스템이 중심이 된다.
Skunk Works는 조만간 이러한 개념에 대한 초기 비행 시험을 시작할 것이며 이 첫 시험은 F-35 Joint Strike 스텔스 전투기와 쌍을 이룬 Speed Racer 드론의 예가 포함될 것이다.
Speed Racer는 실험적인 저비용 “pathfinder”로 설계되었으며 새로운 디지털 엔지니어링과 제조 기술을 시연하기 위해 최초 개발되었다.
이 드론은 모듈식 구조를 가지고 있어서 새로운 임무에 비교적 쉽게 재구성될 수 있다.
Lockheed Martin사의 부사장이자 Skunk Works의 매니저인 John Clark는 프로젝트 ‘Carrera’로 알려진 유연한 자동화 계획에 대한 상세한 설명을 제공하였다.
Carrera는 스페인어로 “race”를 뜻하며 속도를 강조하고 있다.
Clark는 이 프로젝트는 적어도 2007년으로 거슬러 올라간 작업에 기반을 두고 있다고 언급했다.
또한 Skunk Works의 책임자는 이 이름을 결정한 배경에는 팀원 중 포르쉐의 Carrera 라인의 팬이 있었으며 그의 영향을 받기도 했다고 말했다.
“전체 아이디어는 인간이 구축된 소프트웨어 시스템 주변으로 적응하도록 하는 것 대신 소프트웨어 시스템이 인간 주변으로 적응하는 것이며 모든 인간은 다르게 시스템과 상호작용하는 것을 좋아한다”라고 Clark은 설명한다.
예를 들어, 다수의 항공기 전투에서 어떻게 조종해야 할지를 아는 숙련된 전투기 조종사는 신입 조종사보다 즉각적으로 한 대 이상의 무인 시스템과 어떻게 상호 동작해야하는지를 이해할 수 있다.
그렇기 때문에 기존의 항공기와 미래의 드론이 어떻게 상호 협력할지는 이와 같은 다양한 인적 요인을 고려할 수 있는 유연성이 필요하게 된다.
“우리가 진짜로 초첨을 두고 있는 것은 인간과 무인 시스템 간의 상호 작용을 평가할 수 있고 시간이 지남에 따라 이 절차가 어떻게 구축되는 지를 이해할 수 있는 체계의 구축이며…유연한 자동화 프레임워크이다.”라고 Skunk Works 책임자는 말한다.
초기 단계는 주로 자동화 무인 항공기의 핵심 요구인 “행동” 를 정의하는데 초점을 둘 것이며 그다음 단계에서는 유인 플랫폼과의 협업을 포함한 단일 임무의 과정 속에서 자동화 기능의 무인 시스템이 실제로 전체 ‘Kill Chain’을 어떻게 수행하는지 탐구하는 것이다.
이후에 초점은 이 모든 슬롯들이 우주 기반 시스템을 포함한 훨씬 넓은 범위의 자산이 포함된 ‘Kill Web’ 안에서 어떻게 되는지로 옮겨갈 것이다.
Skunk Works는 지난 7월 저궤도 위성을 유인 항공기의 무인 팀원으로 이용하는 아이디어에 대한 탐구를 했다고 한다.
Clark는 프로젝트 Carrera가 하드에어와 소프트웨어 측면에서 모듈화와 개방형 구조 시스템을 갖는다고 강조했으며 발전된 인공지능과 기계학습을 활용하고 있다고 말했다.
목표는 기능을 확장하고 완전히 새로운 기능을 추가할 수 있는 능력을 처음부터 도입하는 것이라고 한다.
Skunk Works의 대표는 기존 시스템 위에 AI 기반 기능 계층을 올리기 위해 이미 수행하고 있는 작업에 대해 설명했다.
“예를 들면, 경로 계획이다.
우리의 비행체가 훌륭한 경로 계획 기능을 가지고 있다.
그러나 우리는 인공지능이 실시간으로 일어나는 이벤트에 대해 능동적으로 대응하는 방법을 더욱 잘 알릴 수 있는 방법을 연구하고 있으며 이를 매커니즘으로 사용하여 경로를 변경하거나 적용 센서를 변경하여 이미 전개된 시스템을 더욱 효과적으로 활용할 수 있다.

프로젝트 Carrera는 약 15년으로 거슬러 올라가는 작업으로부터 탄생하였다.
Lockheed Martin사는 Skyborg 프로그램의 일환으로 미 공군에 이미 시스템을 제공하였으며 이 중의 일부는 시험 기간 동안 Kratos XQ-58 Valkyrie 드론 내부에 탑재되어 비행하였고 Carrera 프로젝트에도 제공될 것이다.
Skyborg은 다양한 형태의 무인 플랫폼에서 운용 시 사용될 AI 기반의 “computer brain”과 관련 시스템을 개발하는 다면적 프로젝트이다.
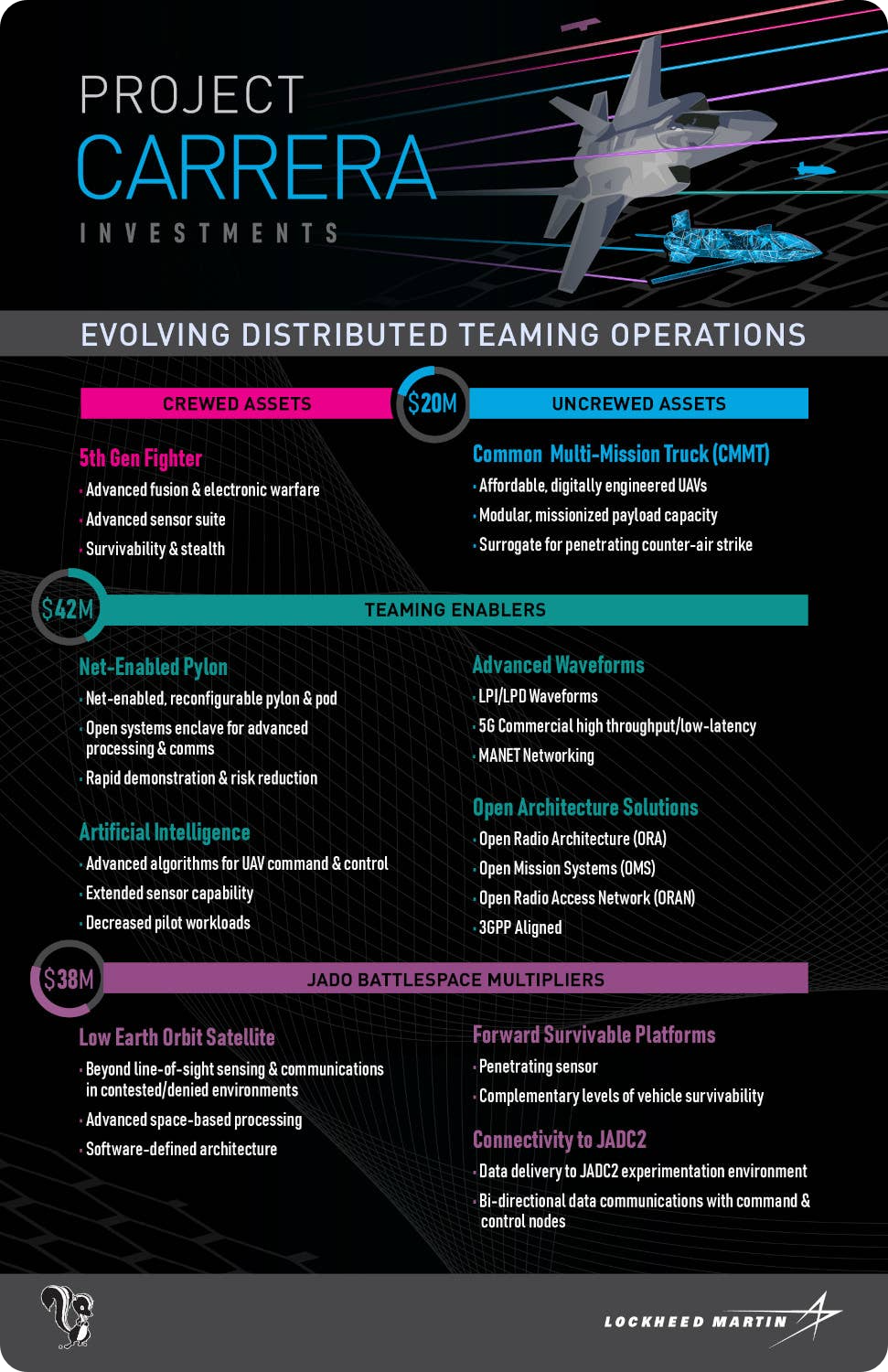
Lockheed Martin사는 실제 유인 및 무인 항공기는 물론 다른 하드웨어와 소프트웨어 그리고 다른 개념적인 개발을 위해 과거와 현재까지 자체 투자금이 최소한 1억 달러가 된다고 한다.
Lockheed가 제공하는 다음의 인포그래픽에는 다양한 초점 영역에 대한 기본적인 개요를 보여준다.
Skunk Works는 유연한 자동화 프레임워크가 전부는 아니지만 많은 부분을 지탱해주는 접착제와 같으며 어느 특정 무인 항공기를 설계하는 것보다 많은 측면에서 더욱 중요하다고 느끼고 있다.
이 개념은 ‘loyal wingman’이 아니며 강아지처럼 F-35를 따라다니는 것이 아니라고 강조한다.
진정으로 초첨을 두고 있는 것은 인간 주변에서 협력할 수 있는 상세한 방법에 대에 어떻게 접근할 수 있는지이다.
무인의 구성은 유인 구성을 보충하는 것이 아니라 상호 보완적이어야 한다고 Clark는 강조한다.
그가 제시한 특별한 예는 고도로 자동화된 무인 항공기 그룹을 조사하거나 복잡한 적의 방공망을 조사하여 이러한 위협 정보를 그들의 유인 카운터파트너에게 전달하는 것이다.
Speed Racer는 현재 소모하기에 적당한 비용의 플랫폼으로 간주된다.
상세한 비용을 언급하지는 않았지만 Skunk Works의 목표는 대당 단가가 2백만불 이하이며 회수되지 않도록 설계된다.
Skunk Works는 유연한 자동화 프레임워크가 더 비싸고 정교한 타입을 포함하여 궁극적으로 다른 드론 설계에까지 확장될 것으로 보고 있다.
이를 염두에 두고 프로젝트 Carrera의 비디오 클립을 보면 흥미롭게도 X-44A의 테스트 영상이 나온다.
이 그림자 비행 날개 설계는 Skunk Works의 RQ-3 Darkstar와 RQ-170 Sentinel 스텔스 스파이 드론 간의 이전에 누락된 연결고리를 보여준다.

Lockheed Martin사에서 유-무인 팀 개념 발표시 보여준 4개의 개별 무인 항공기 설계 중 Speed Racer는 그중 하나였으며 현재는 CMMT(Common Multi-Mission Truck)으로 불린다.

프로젝트 Carrera 실험의 일부는 Speed Racer나 이와 유사한 설계를 위한 더욱 일반적인 적용 개념을 연구하는 것을 포함하고 있다.
하나 이상의 전투기나 다른 종류의 전투 항공기는 이러한 무인 항공기를 전개할 책임을 가지게 될 것이다.
그러나 이것은 다른 무장 장착에 대한 제한을 주게 될 것이다.
Lockheed Martin사의 공식적인 프로젝트 영상에는 F-35가 미래의 CMMT를 주익 파일런에서 발사하는 영상을 볼 수 있으며 이 전개 모드는 항공기의 스텔스 특성에 부정적인 영향을 주게 될 것이다.

Skunk Works는 싸고 소모적인 공중 발사 드론이 운용이나 지원체계에 도움이 될 것이라는 데이터를 가지고 있다고 한다.
Speed Racer와 같은 드론은 그 자체로 활주로나 다른 중요 시설을 필요로 하지 않는다.
미군은 중국과 러시아와 같은 적과의 충돌에서 비행장 및 다른 시설에 대한 취약성에 대한 우려를 점점 더 강조하고 있으며 새로운 대안이나 분산을 기반으로 하는 개념을 원하고 있다.
따라서 Speed Racer를 전개하는 새로운 방식 특히, 대량으로 전개하는 방식이 필요하다.
Skunk Works는 이미 Lockheed Martin의 Missile and Fire Control 부서와 미 공군을 위해 개발된 Rapid Dragon 시스템을 활용하는 잠재적인 방안에 대해 이야기했다고 한다.
Rapid Dragon의 현재 형태는 C-17A Globemaster III나 C-130 Hercules와 같은 화물 항공기가 AGM-158 JASSM(Joint Air-to-Surface Standoff Missile) 순항 미사일이나 다른 잠재적인 무기의 변형을 발사하기 위한 palletized munition 시스템이다.
앞에서 계속 얘기했듯이, Skunk Works는 프로젝트 Carrera를 활용한 많은 계획을 가지고 있으며 첫번째 단계에서는 다양한 미래의 유-무인 팀 협조 계획을 연구하고 구체화하였으며 시스템은 이를 지원하기 위해 반드시 필요할 것이다.
비록 이는 주로 회사 내부의 개발로서 투자되었지만 이미 미 공군과 해군의 대표단과 이 프로젝트에 대한 협의를 하였다.
미 공군과 해군은 모두 개별적이지만 NGAD(Next Generation Air Dominance) 미래 공중 전투 프로그램으로 얽혀서 미래의 유-무인 팀에 대한 관심이 많다.
미 해군은 NGAD에 대한 공식적인 발표를 꺼려하는 반면에 미 공군은 CCA(Collaborative Combat Aircraft)로 불리는 것을 개발하고 획득하는 것에 대한 진화하는 계획에 대해 최소한의 기본적인 수준에 있어서는 개방적이다.
Skunk Works 또한 유-무인 비전에 대해서 매우 개방적이며 더욱 상세한 내용은 비행 시험 프로그램이 가까이 온 프로젝트 Carrera를 통해 밝혀질 것이다.
출처 : The WARZONE
'Military Information' 카테고리의 다른 글
| 우크라이나로 향하는 Game Changer NASAMS - 2022.10.17 (3) | 2022.10.30 |
|---|---|
| 만약 22+35=57 이라면, 러시아의 Su-57 전투기가 미국의 F-22와 F-35보다 더 우수한가? - 2022.09.18 (1) | 2022.10.09 |
| Su-35의 비중을 늘리는 러시아와 Su-35의 낮은 생존성 - 2022.09.12 (2) | 2022.09.15 |
| F/A-18 Super Hornet에서의 첫 번째 LITENING Targeting Pod 시험 - 2022.09.07 (2) | 2022.09.11 |
| 전투 장갑 차량의 능동적인 방어를 위한 레이다, 대응 사격, 신호 처리 - 2022.08.08 (2) | 2022.08.16 |




댓글